My facility uses our cobot to cut material into a strips of the same thickness. Previously, we have used the pallet function to repeat this motion, but I was wondering if there are any other functions that may work better. Possibly the “At Each Item” function?
Firstly-the pallet template is an acceptable way to accomplish your task it sounds like. You are correct-using an ‘at each item’ sequence can allow your robot to perform its necessary function at each waypoint in the trained pallet formation-in your case a material cut action.
Secondly-Have you looked at our UR+ options for cutting? Our UR+ products are basically like the app store for UR cobots. They combine the UR platform with the talent of the industry’s largest ecosystem, and provides users access to a collection of peripherals and application kits designed for success.
Lasly-if could you give a bit more info on the tool attached to your cobot and how it interfaces, and any other communications you are interfacing with the cobot, that would be helpful in giving more feedback on ways to work out this application.
I have not looked at the UR+ options - that’s so much for bringing it to my attention. Is there any instruction on what software version our cobot may need to be on to use these?
See the attached pictures for the cutting tool we have attached to our cobot arm and the pattern we are hoping to cut.
Hi thanhpv -
the Palletizing approach works as it sets the line pattern well and using the Force command to ensure the robot is cutting all the way through the material and the approach command to ensure it is not cutting if there is no material.
We do see some issues with our cobot “glitching” at seemingly random points and very persistent protective stop warnings.
I feel like there’s an easier program to use and I am looking forward to testing the Toolpath command.
Below is the script we are using. Feel free to let me know if there’s a better way to set this program up.
Program
Robot Program
MoveJ
Waypoint_7
Pallet
Pattern: Line
StartPos_1
EndPos_1
PalletSequence
Approach_1
PatternPoint_1
Force
MoveL
Waypoint_9
If get_sensor_fx()>5
Force
MoveL
Waypoint_2
Gripper Activate
Gripper Close (1)
Set
Wait: 0
Else
MoveL
Waypoint_3
MoveJ
Waypoint_7
cnt_1≔20
Halt
MoveJ
Waypoint_6
MoveJ
Waypoint_10
Find Surface
‘Add Stop conditions from the Command tab’
MoveJ
Waypoint_4
Gripper Activate
Gripper Open (1)
MoveL
Waypoint_5
Gripper Move75% (1)
MoveJ
Waypoint_1
MoveJ
Waypoint_8
Wait get_sensor_fy()>5
Gripper Open (1)
Wait: 0
Wait DI[0]=HI
AfterEnd
MoveJ
Waypoint_7
Wait DI[0]=HI
Yes, the Force command is pressing down on the table top, although it does not always cut through the material (It will use the force command directly on the tabletop and then Move to cut a straight line. Once the tool makes contact with the material, sometimes it will push the blade up, thus preventing a full cut through the slab)
Throughout the pallet sequence, we also get several Protective Stop alerts. I have tried to off set these with different accelerations, TCP payloads, and center of gravities, but nothing seems to improve. Any thoughts?
Problem #1:" Once the tool makes contact with the material, sometimes it will push the blade up, thus preventing a full cut through the slab". I think cause by uneven material or friction when knife is in the middle of plate or material is cornered due to blade not sharp enough.
Problem #2: " Throughout the pallet sequence, we also get several Protective Stop alerts" . Cause by you only using the force simple while blade is also available in the horizontal direction of the movement to cut the material.
To overcome these two problems, only the force frame option can be selected and maximized the force
I implemented the Force Frame function to increase force downward into the cutting surface and the force in the direction the cobot is cutting, however, i am getting the same protective stops…
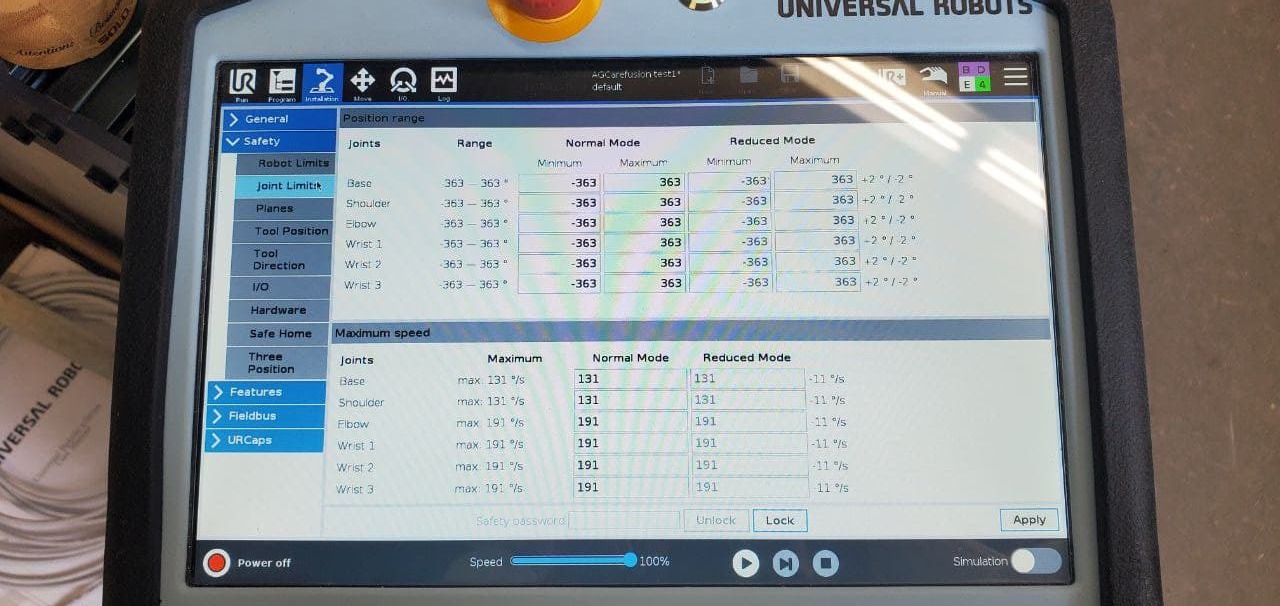
In the ’ Safety setting’, Have you set the maximum power and torque?
If everything is set to maximum then the robot probably doesn’t match the required capacity.
What kind of robot to use?
I am unclear. How do I change it to maximum? Do you mean set it to “least restricted”
Also some notes:
Using the Force Frame function led the robot to deviate from its path (both is x=0 and if y=10)
Currently using a simple force of 19N in the Z direction
the protective stops are consistently in the center portion of the cut… no idea if the downward force is greatest here or what else may be causing this consistent error.