We have recently purchased 2 UR5s for our project. I have defined a new Feature Plane called “display” with following specs: p[0.5391674406968558,0.2501721015613766,0.3385201982265926,0.7230735002351665,-0.7705353908790852,-1.3823487705853308]
I put the robot in a random position and read the following 2 Positions in respect to Base and display (I attached the photos): Point in Base: p[0.45312, 0.30545, 0.47647, 4.071, -0.539, -2.517]
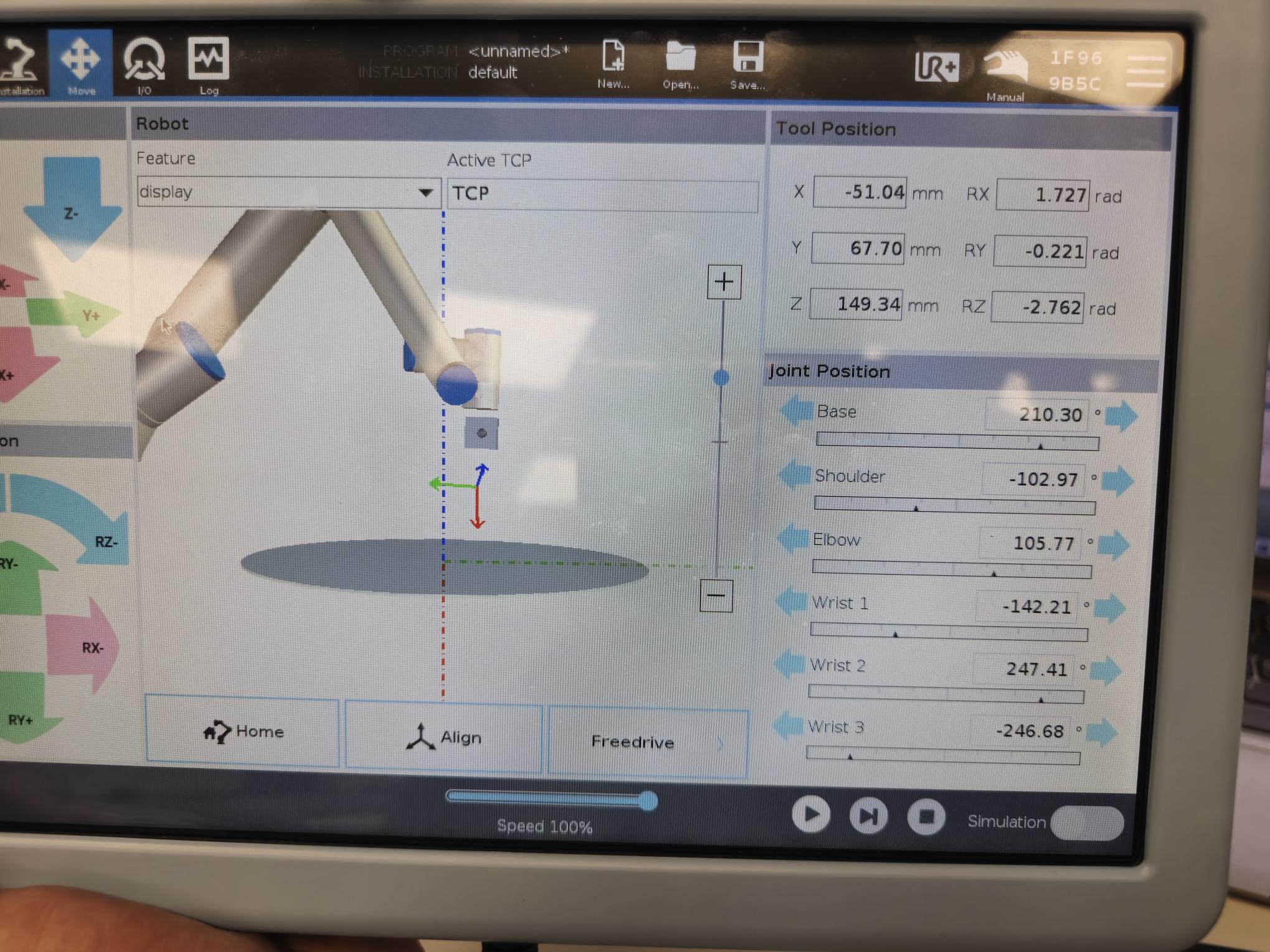
When I switch to display, I read the following:
Point in display: p[-0.05105, 0.06768, 0.14934, 1.727, -0.221, -2.762]
My question is, how to I convert them from one to another ? preferably using Math equations. or otherwise by using the Functions within a program.
The rotations have other values, but the result pose is the same. There are multiple solutions to each position.
If you write the values into the Move tab, then you will see the robot won’t move.
Not that I know of, no. Do you actually need to have the same numbers, if the pose is the same? You should be able to alter the pose as you wish still.
there are multiple ways. What is your end goal? If you want to just associate a position from base to your feature, you can just set that in the command section of the move. If you want to do different pose modifications on the fly, you may need a combination of pose trans and pose adds. I would suggest having a look through the URscript manual.