Is there an option to sound an buzzer type alarm when robot goes into Safe-Guard mode? For example, by a safety button press or when an inconvinient error occurs I’d like to sound an alarm.
I’ve already looked at the options of configurable outputs. I’m aware there is just that for an Emergency Stop, however, E-Stops occur rarely and I’m looking at 2-3 SafeGuards per shift due to external components. I already have indicator lights (red, orange, green) for indicating states. For that I’m using: Prog-Running, Robot Moving and System Emergency Stop options. The first one indicates Safe Guards but lights up even if the robot is waiting for something like a button press. The second, just indicates the opposite and is wired to green. The thirds is self explanatory.
I can’t wire the buzzer to output “Prog-Running”, because the buzzer will make a sound everytime the robot waits for operators input or any other triggers.
Instead of using the safety I/O, you can go to Installation → I/O Setup and open a digital output. Here you will find different actions for the highlighted output.
If you are using an e-series robot, it is possible to disable a digital output on unscheduled stop. It will be high all the time otherwise (also when program is paused or stopped).
Thanks for your help. How are unscheduled stops defined? Is Safe Guard considered an unscheduled stop even though the program running isn’t actually stopped and can be resumed after reseting Safe Guard?
I tested it today. It won’t work like you suggested. Triggering safe-guard mode doesn’t affect the output set on “Low on Unscheduled Stop”. As per manual:
“A program is terminated unscheduled if any of the following occur:
• Protective stop
• Fault
• Violation
• Runtime exception”
is it possible to write a thread?
I mean you could observe the Input of ur safety guards and if the signal is not like u expect (E-Stop presed/ door open eg.) u can set a DQ and connect ur lamp/ horn at that DQ?
Or is ur robot connected to a PLC/ PC?
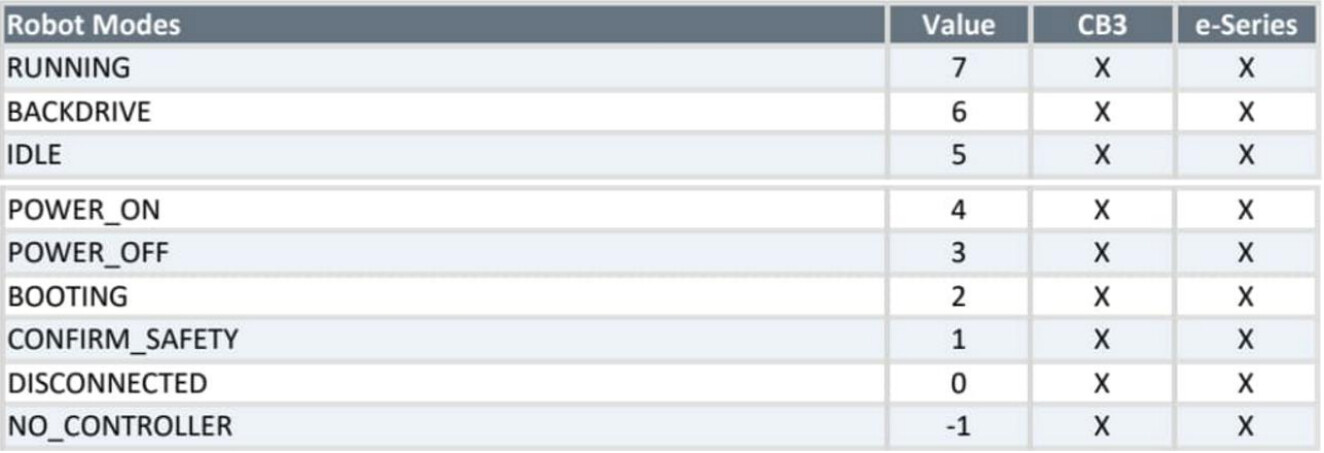
Cause then you could check for the Value of the Safety Mode of ur Robot:
Can you share where you’ve found this table and what are these variables/states (ex. SAFETY_MODE_SAFEGUARD_STOP)? From what I can see e-Series is crossed out and not supported and I’d like to check to make sure.
Yes, I am using threads but I don’t know how I’d incorporate these Safety modes from the table. I get the basic logic you mentioned.
No, our robot is not connected to a PLC, only via remote VNC to a PC and that is it.
This could work. I’d have to make a circuit breaker buzzer alarm, so when the Safe Guard dual channels break, the alarm should go on. But safe-guards and e-stops are NC circuits so I’d have to add another relay. Do you have any experience how to wire this up?
Just connect one channel of your safeguard equipment to A1 and A2. Make sure it isn’t OSSD (switching signal), though.
Then you can connect a 24V to COM and your buzzer 24V input to NC.
If you don’t want the buzzer to go off when the program is not running, you can connect another relay which the robot controls, which is enabled when the program is running.
Thank you for your help! This sounds doable. I will try it out and get back to you:)
However, when thinking about it I should use two relays. Since the circuits are doubled, the safety control unit in the robot controller box measures any time discrepancy between the two circuits in range of couple miliseconds. Do you think that a mechanical relay could impede this function since the switching times are slower?
It´s from the Dashboard-Server Manual.
My Robot is connected to a PLC (via Profinet).
Cause there i can read those Tags “Safety Modes” and “Robot Modes”.
I need those informations to reset my safety from my PLC (with an “automatic” routine).