I’ve setup a robot to hold a workpiece and to guide it over a remote tool centre point based on toolpaths generated using the UR plugin for Solidworks.
Initial tests done with a pen to verify the operation and I get nicely drawn lines on the workpiece as per the toolpaths.
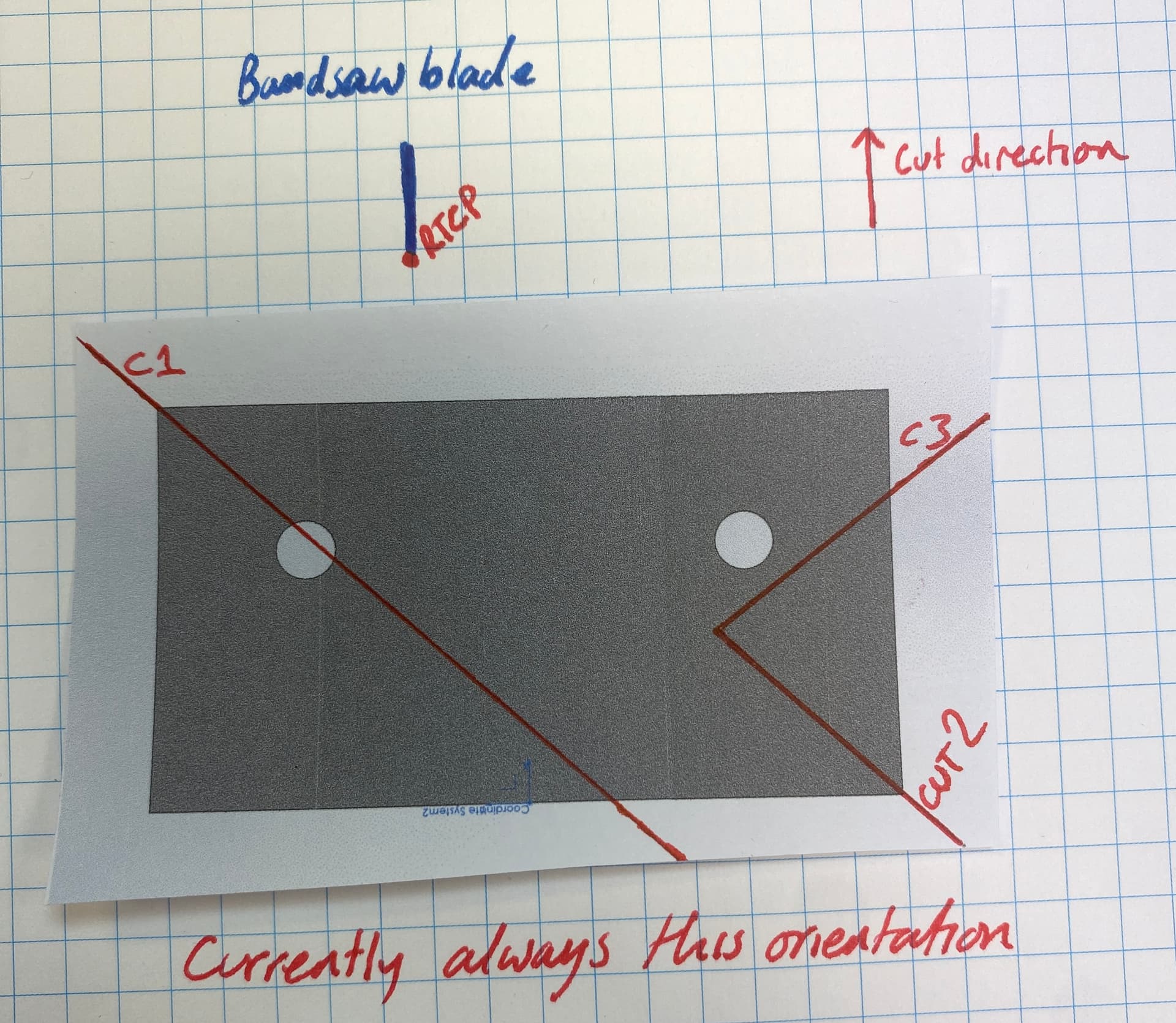
However, the pen would be replaced by a bandsaw and the cut needs to be done in the direction of the blade. Currently, the part is fixed rotation and whilst that wouldn’t matter which direction it is driven across the pen (router, sander wouldn’t matter either) I need the robot to be able to calculate the angle it needs to turn to and re-orientate itself to always follow the toolpath in the same direction.



Any guidance on this would be appreciated.