Hello.
I am new to using modbus/TCP communication.
Has anyone ever used IAI’s RCON controller for grippers as a Modbus server to communicate with a robot?
I would like to send this
0000 0000 0006 0106 0D00 0100
slave address:01
Function Code:06
address:0D00
Data:0100
If it works correctly, it should return something like this
0000000000000007D00304000008BA
I have set it up as pictured below
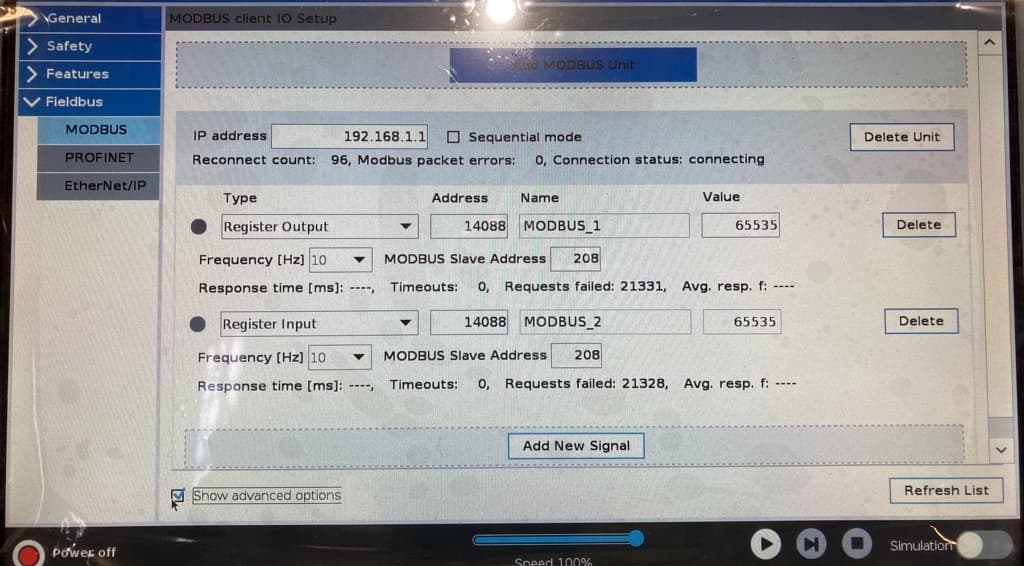
However, it does not work.
Any help would be appreciated.
Thanks