def test_force():
global _hidden_verificationVariable=0
set_target_payload(0.950000, [0.005000, -0.039000, 0.040000], [0.001413, 0.001413, 0.001413, 0.000000, 0.000000, 0.000000])
set_tcp(p[0.0,-0.055,0.14,0.0,0.0,0.0])
set_gravity([0.0, 0.0, 9.82])
set_safety_mode_transition_hardness(1)
set_standard_analog_input_domain(0, 1)
set_standard_analog_input_domain(1, 1)
set_tool_analog_input_domain(0, 1)
set_tool_analog_input_domain(1, 1)
set_analog_outputdomain(0, 0)
set_analog_outputdomain(1, 0)
set_input_actions_to_default()
set_tool_communication(False, 115200, 0, 1, 1.5, 3.5)
set_tool_output_mode(0)
set_tool_digital_output_mode(0, 1)
set_tool_digital_output_mode(1, 1)
set_tool_voltage(0)
global Pallet_1_cnt=6
global Plan_1=p[0.1331296435580705,-0.868169226499013,0.5414466022040523,-0.026350403751349852,-2.2100886491352374,2.2097378874972122]
global Plan_2=p[-0.5811237050703881,-0.11303890891523599,0.7503348138735667,-1.1538081375598757,1.2916246071485196,-1.2916445484211498]
global Plan_3=p[-0.1074386792596403,0.872619415032094,0.470772857903887,-8.391431435361943E-4,2.220723223384258,-2.220742709807844]
global Pose_plato_cart=p[0.4499628973496344,0.33541456507623196,0.047476952042385,0.011788520595514045,-0.14123614456418684,-1.5867235264270372]
global recup_carte=p[0.7198780491177688,0.061841770833425624,0.1260950803757087,4.0819941219672964E-5,2.3367727536255763E-5,-1.6087545549689768]
global recup_plato=p[0.21124180094928877,0.4522677928147516,-0.09171934518012236,-1.2110157265630829E-5,3.141565806848833,-5.8237517913496376E-5]
step_count_beb89c4e_fe97_4a74_8a82_fca6fab741e2 = 0.0
thread Step_Counter_Thread_28341fa3_f2d7_4e3d_afb8_39291027116d():
while (True):
step_count_beb89c4e_fe97_4a74_8a82_fca6fab741e2 = step_count_beb89c4e_fe97_4a74_8a82_fca6fab741e2 + 1.0
sync()
end
end
run Step_Counter_Thread_28341fa3_f2d7_4e3d_afb8_39291027116d()
global PointPassage_1_p=p[.485490348113, .106408567100, .345591807965, 2.239394263184, -2.187618073974, -.035902492588]
global PointPassage_1_q=[3.0712695121765137, -1.7217604122557582, 1.7059066931353968, -1.5291317229023953, -1.5612366835223597, -0.09381324449648076]
def calculate_point_to_move_towards(feature, direction, position_distance):
local posDir=[direction[0], direction[1], direction[2]]
if (norm(posDir) < 1e-6):
return get_target_waypoint()
end
local direction_vector_normalized=normalize(posDir)
local displacement_pose=p[direction_vector_normalized[0] * position_distance,direction_vector_normalized[1] * position_distance,direction_vector_normalized[2] * position_distance,0,0,0]
local wanted_displacement_in_base_frame=pose_sub(pose_trans(feature, displacement_pose), feature)
return pose_add(get_target_waypoint(), wanted_displacement_in_base_frame)
end
global PointPassage_2_p=p[.787139381863, .106395379473, .276564414617, 2.239293112206, -2.187606334181, -.036011811018]
global PointPassage_2_q=[3.1005823612213135, -0.9678192895701905, 0.9489725271808069, -1.5262337413481255, -1.5601580778705042, -0.06493932405580694]
global PointPassage_4_p=p[.787158245562, .106393106350, .038050253400, 2.239326347726, -2.187628157979, -.035947396437]
global PointPassage_4_q=[3.100332260131836, -0.8173595827868958, 1.3257868925677698, -2.053578039208883, -1.5602543989764612, -0.06343347231020147]
global PointPassage_5_p=p[.787136672904, .106397065853, .276559470999, 2.239281266224, -2.187601923975, -.036014634583]
global PointPassage_5_q=[3.1005871295928955, -0.9678192895701905, 0.9489815870868128, -1.5262337413481255, -1.5601652304278772, -0.06493121782411748]
$ 1 "AvantDémarrage"
$ 2 "Départ"
movej([3.1611130237579346, -1.943632265130514, 1.6774948279010218, -1.3376277548125763, -1.5664294401751917, 0.016863178461790085], a=1.3962634015954636, v=1.0471975511965976)
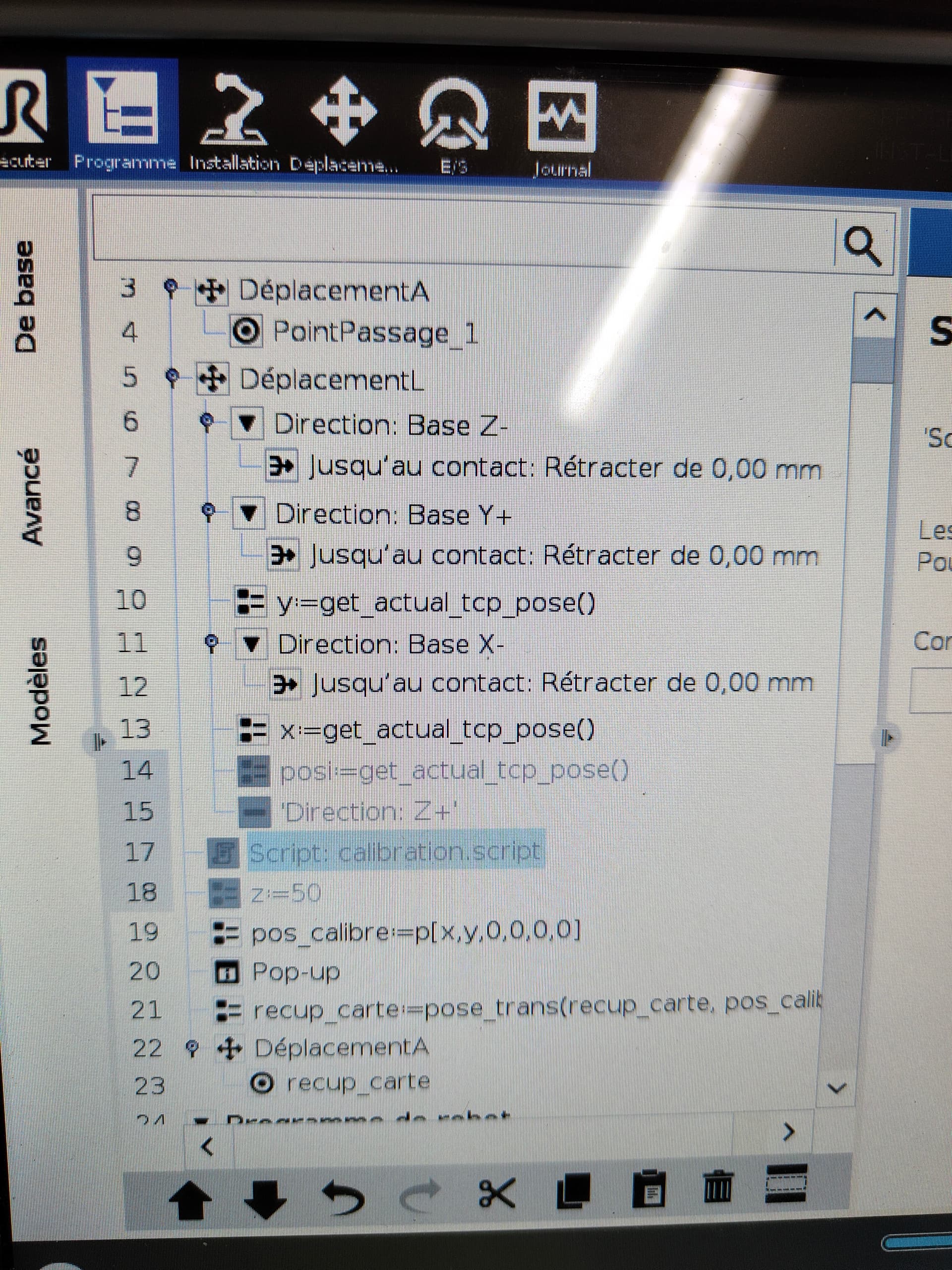
$ 3 "DéplacementA"
$ 4 "PointPassage_1" "breakAfter"
movej(get_inverse_kin(PointPassage_1_p, qnear=PointPassage_1_q), a=1.3962634015954636, v=1.0471975511965976)
$ 5 "DéplacementL"
$ 6 "Direction: Base Z-"
global move_thread_flag_6=0
thread move_thread_6():
enter_critical
move_thread_flag_6 = 1
local towardsPos=calculate_point_to_move_towards(p[0.0,0.0,0.0,0.0,0.0,0.0], [0.0,0.0,-1.0], 1000.0)
movel(towardsPos, a=1.2, v=0.08)
move_thread_flag_6 = 2
exit_critical
end
move_thread_flag_6 = 0
move_thread_han_6 = run move_thread_6()
while (True):
local targetTcpDirection=get_target_tcp_speed()
local stepsToRetract=tool_contact(direction=targetTcpDirection)
if (stepsToRetract > 0):
kill move_thread_han_6
stopl(3.0)
local backTrackMovement=get_actual_joint_positions_history(stepsToRetract)
local contactPose=get_forward_kin(backTrackMovement)
local posDir=[targetTcpDirection[0],targetTcpDirection[1],targetTcpDirection[2]]
local retractTo=contactPose
if (norm(posDir) > 1e-6):
local normalizedPosDir=normalize(posDir)
local additionalRetraction=p[normalizedPosDir[0] * 0.0, normalizedPosDir[1] * 0.0, normalizedPosDir[2] * 0.0, 0, 0, 0]
retractTo = pose_sub(contactPose, additionalRetraction)
end
movel(retractTo, a=3.0, v=0.1)
$ 7 "Until (tool_contact_detection)"
break
end
sync()
end
$ 8 "Direction: Base Y+"
global move_thread_flag_8=0
thread move_thread_8():
enter_critical
move_thread_flag_8 = 1
local towardsPos=calculate_point_to_move_towards(p[0.0,0.0,0.0,0.0,0.0,0.0], [0.0,1.0,0.0], 1000.0)
movel(towardsPos, a=1.2, v=0.08)
move_thread_flag_8 = 2
exit_critical
end
move_thread_flag_8 = 0
move_thread_han_8 = run move_thread_8()
while (True):
local targetTcpDirection=get_target_tcp_speed()
local stepsToRetract=tool_contact(direction=targetTcpDirection)
if (stepsToRetract > 0):
kill move_thread_han_8
stopl(3.0)
local backTrackMovement=get_actual_joint_positions_history(stepsToRetract)
local contactPose=get_forward_kin(backTrackMovement)
local posDir=[targetTcpDirection[0],targetTcpDirection[1],targetTcpDirection[2]]
local retractTo=contactPose
if (norm(posDir) > 1e-6):
local normalizedPosDir=normalize(posDir)
local additionalRetraction=p[normalizedPosDir[0] * 0.0, normalizedPosDir[1] * 0.0, normalizedPosDir[2] * 0.0, 0, 0, 0]
retractTo = pose_sub(contactPose, additionalRetraction)
end
movel(retractTo, a=3.0, v=0.1)
$ 9 "Until (tool_contact_detection)"
break
end
sync()
end
$ 10 "Direction: Base X+"
global move_thread_flag_10=0
thread move_thread_10():
enter_critical
move_thread_flag_10 = 1
local towardsPos=calculate_point_to_move_towards(p[0.0,0.0,0.0,0.0,0.0,0.0], [1.0,0.0,0.0], 1000.0)
movel(towardsPos, a=1.2, v=0.08)
move_thread_flag_10 = 2
exit_critical
end
move_thread_flag_10 = 0
move_thread_han_10 = run move_thread_10()
while (True):
local targetTcpDirection=get_target_tcp_speed()
local stepsToRetract=tool_contact(direction=targetTcpDirection)
if (stepsToRetract > 0):
kill move_thread_han_10
stopl(3.0)
local backTrackMovement=get_actual_joint_positions_history(stepsToRetract)
local contactPose=get_forward_kin(backTrackMovement)
local posDir=[targetTcpDirection[0],targetTcpDirection[1],targetTcpDirection[2]]
local retractTo=contactPose
if (norm(posDir) > 1e-6):
local normalizedPosDir=normalize(posDir)
local additionalRetraction=p[normalizedPosDir[0] * 0.0, normalizedPosDir[1] * 0.0, normalizedPosDir[2] * 0.0, 0, 0, 0]
retractTo = pose_sub(contactPose, additionalRetraction)
end
movel(retractTo, a=3.0, v=0.1)
$ 11 "Until (tool_contact_detection)"
break
end
sync()
end
$ 12 "posi≔get_actual_tcp_pose()"
global posi= get_actual_tcp_pose ()
$ 17 "pos_calibre≔p[posi[0],posi[1],posi[2],0,0,0]"
global pos_calibre=p[posi[0],posi[1],posi[2],0,0,0]
$ 18 "Pop-up"
popup(str_cat("",pos_calibre), "Message", False, False, blocking=True)
$ 19 "recup_carte≔pose_trans(recup_carte, pos_calibre)"
global recup_carte= pose_trans (recup_carte, pos_calibre)
$ 20 "DéplacementA"
$ 21 "recup_carte" "breakAfter"
movej(recup_carte, a=1.3962634015954636, v=1.0471975511965976)
$ 36 "Thread_1"
thread Thread_1():
while (True):
$ 37 "capt_force≔force()"
global capt_force= force ()
$ 38 "position_actuel≔get_actual_tcp_pose()"
global position_actuel= get_actual_tcp_pose ()
$ 39 "sync()"
sync()
end
end
threadId_Thread_1 = run Thread_1()
while (True):
$ 22 "Programme de robot"
$ 23 "DéplacementL"
$ 24 "PointPassage_2" "breakAfter"
movel(pose_trans(recup_carte, pose_trans(p[.089121558906, -.717014070189, -.137084069729, -.000040819941, -.000023367728, 1.608754554969], PointPassage_2_p)), a=1.2, v=0.25)
$ 25 "PointPassage_4" "breakAfter"
movel(pose_trans(recup_carte, pose_trans(p[.089121558906, -.717014070189, -.137084069729, -.000040819941, -.000023367728, 1.608754554969], PointPassage_4_p)), a=1.2, v=0.25)
$ 27 "Attendre: 0.5"
sleep(0.5)
$ 28 "Pop-up: recup carte"
popup("recup carte", "Message", False, False, blocking=True)
$ 29 "DéplacementL"
$ 30 "PointPassage_5" "breakAfter"
movel(PointPassage_5_p, a=1.2, v=0.25)
$ 31 "Régler Aspiration=Off"
set_standard_digital_out(1, False)
$ 32 "Régler Souflette=HI:Pulse 0.1"
thread SinglePulse50():
set_standard_digital_out(0, True)
sleep(0.1)
set_standard_digital_out(0, False)
end
singlePulse50 = run SinglePulse50()
$ 34 "Départ"
movej([3.1611130237579346, -1.943632265130514, 1.6774948279010218, -1.3376277548125763, -1.5664294401751917, 0.016863178461790085], a=1.3962634015954636, v=1.0471975511965976)
$ 35 "Stop"
halt
end
end