Hello,
i am trying to find the best practice for execute a time-series reference joint angles without stopping at intermediate points.
The “time-series reference joint angles” here means a data structure like JointTrajectory in ros which includes bunch of joint angle+velocity+acceleration list and a “target reach time” for each point in this list.
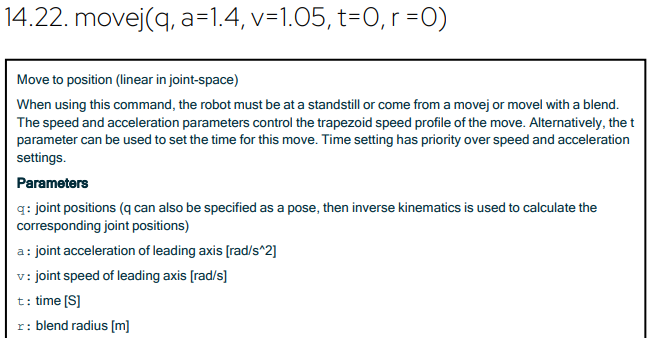
I know that moveJ API can pass joint angle+velocity+acceleration lists with a blend radius, but there is no argument for “target reach time” in moveJ API. Furthermore i want to make robot pass all the intermediate point so i have to set blend radius to zero, but it will result stopping at every intermediate points, doesn’t it?
Also I know ros control framework can achieve this, i just wondering is there any way to do the same execution without using ros.
Any advice would be appreciated.