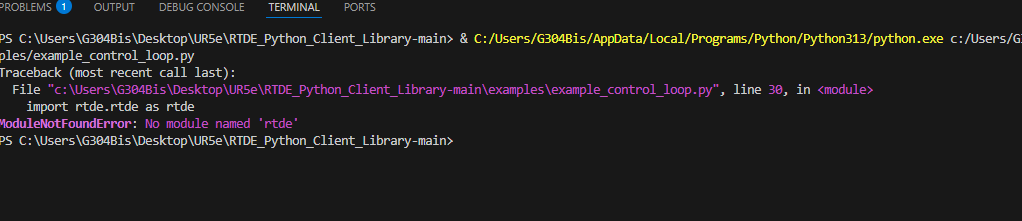
I started using the robot for simple tasks but when I tried to program it with Python it got complicated. I used UniversalRobots/RTDE_Python_Client_Library and at first it worked without any problem but out of nowhere it stopped working and gave me the error that the RTDE library could not be found. I tried to download it again because I assumed I had changed something but it gave me the same error.
can you run pip freeze command to see if the rtde package is showing in the list
You probably need to run the command in the example directory.
You can run follow command:
“cd examples && python3 example_control_loop.py”
“ur_rtde” appears but I don’t see one that only has RTDE