Hi, we have a UR3e and currently involved setting it up with light curtains. I have successfully connected the light curtain and can get into safeguard stop when the beam in broken etc. However, I have a problem the same as this post:
Since the 3 triggers are exclusive, you can only have 1 way of controlling the mode at a time. So if an electrical switch has been set up to do so, then you cannot change it through the Dashboard Server or on the Teach Pendant (with the Operational Mode Password).
I hope it helps! You can read more about the different modes in the chapter “Operational Mode Selection” in the User Manual.
Thanks @WattsUp@spbe . That’s some good information. If I am correct in thinking - A switch if wired correctly will essentially allow me to press (effectively bypassing the automatic mode) and then enter into manual mode again meaning I will not get that message.
To clarify - I currently am not able to enter into the installation tab meaning that I can not change any safety settings.
Hi i had same issue as you with “Unable to change operational mode. It is currently controlled by the operational mode safety input.”
I found this article.
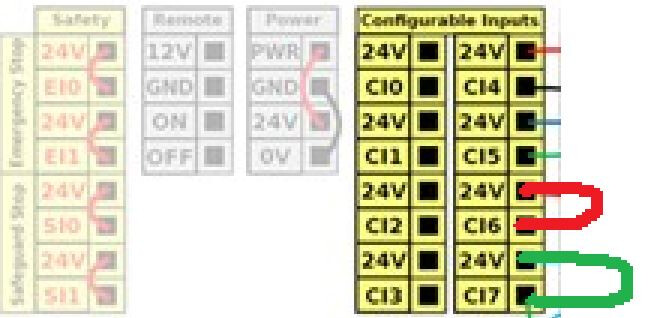
Based on the article and since i did not had a 3-position device at my disposal. I took the terminal showed on the picture below (right side terminal) and connected a jumper from 24V to CI6 and another jumper fom 24V to CI7.
When i turned on the controller again i was in manual mode and able to change the installation.
Alternative flash another SD-card with the latest image of PolyScope (5.12.4) and copy the programs over.
I am using a three position teach pendant and Config_in[0], Config_in[1] are set to “Protective stop for automatic mode”. As I read in the user manual, I can drive the robot freely in manual mode even if the protective stop is active if I use this configuration for the protective stop.
But I can’t move the UR10 freely with this configuration. does anyone have any ideas?
Hello,
i am in the automatic mode and when i want to move to the manual mode
i can see this message in the teaching pendant of UR30:
“Unable to change operational mode. It is currently controlled by the operational mode safety input”, how i can solve the issue? most of the icons including installation are inactive. I have set the operational mode passwords but it is not successful. i am wondering if you could help me to change the mode?
Your safety settings are set up for an operational mode safety input, as Char is describing earlier.
You have to jump your inputs, as he shows in his image. You should be able to see which inputs are used for the switch in the IO tab.
After this, you should be able to go to Installation → Safety → IO and remove the operational mode input in the safety settings.