For some reason i have problems with my dashboard server communication with my Siemens S7-1200 PLC.
The connection is programmed with TIA.
The connection is working, but there are problems with the Dashboard commands.
With the TIA TSEND block it is possible to send strings to the UR. the commands ‘power on $L’ and ‘power off$L’ are working fine. But it is not possible that commands like ‘brake release’ are undersood by the UR.
Has anyone more experiece with this type of Problem?
I was able to get the command to go through using the T_SEND_C block and ‘brake release$R$L’ on TIA 15.1. You can also take a look at the auto start sequence if that makes your program easier:
@anon13182996
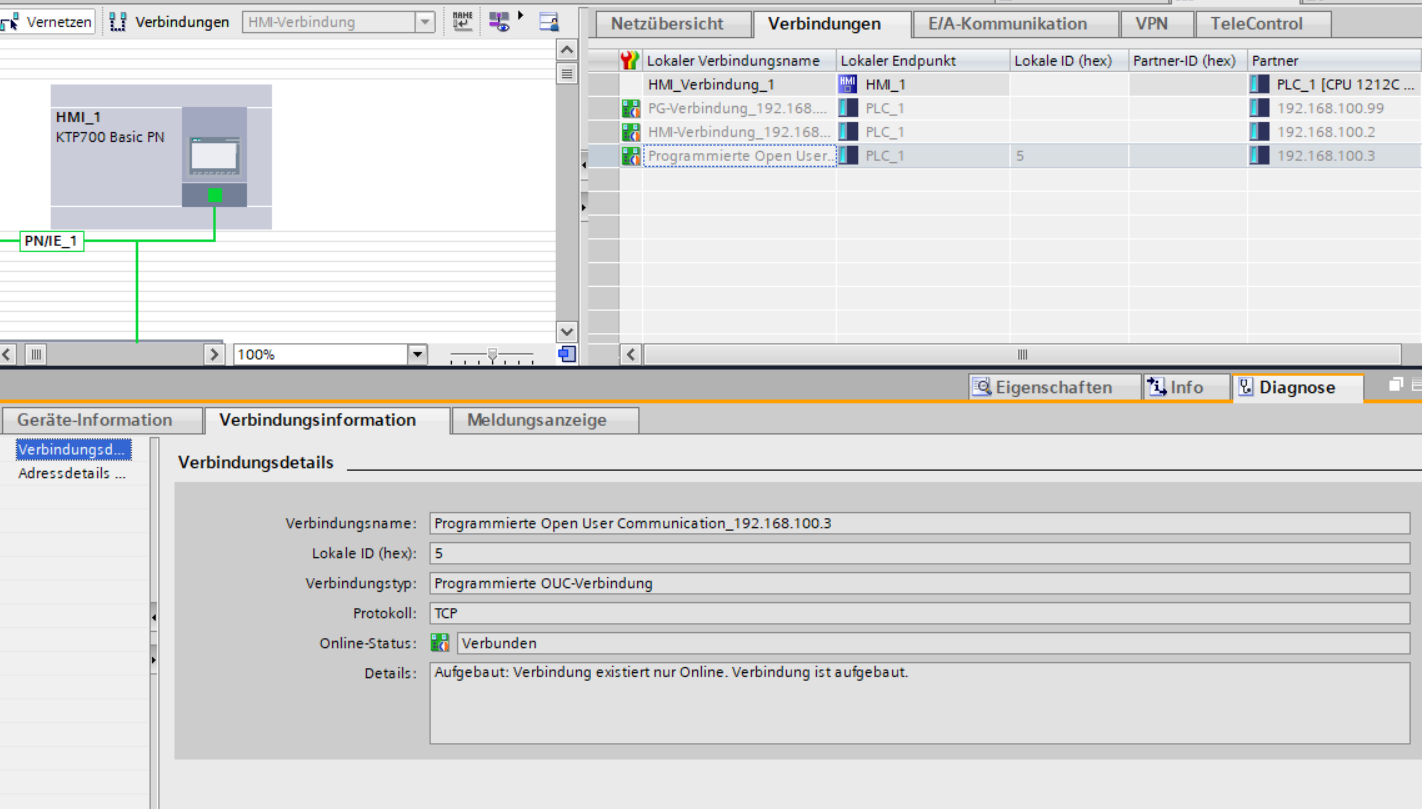
Could you show the connection configuration for the TCON block in TIA? I can’t even establish a connection between S7-1200 and UR. With SocketTest on PC it works fine.
I tried this Comand but it doesn’t work. I don’t know why… I gave up on it.
Now i use the auto start sequence…
But it would be easier with the Dashboard communication because i need the communication for a lot more commands. We use a seperate HMI to operate the robot. The UR Teach-Panel is only for programming in use.
@anon13182996
Thanks for your answer.
I have exactly the same configuration. When i execute TCON i’m still getting an error 80A3 - “Attempt being made to re-establish an existing connection” and ‘power on $L’ doesn’t work. Is there anything else i should do to set up the connection?
I’m not too familiar with TIA or Siemens hardware in general, but here are the files used to test sending the brake release string. Maybe you can find something in here that will help you out.
Usually I’ve only seen setups that use the PLC to load, play and stop programs since you do have to keep the positioning of the robot/external objects in mind whenever auto starting using any method. But you should still be able to release the brakes through the dashboard.
it is not possible for me to open the project. My TIA don’t accept the File: UR_ver.ap15_1
Can you upload the folder again with the archivied programfile?
@anon13182996
Thank you. I had to make new “PLC_Connection_DB” with other ID ( it’s strange but with ID=1 it doesn’t work). Now commands ‘power on$R$L’ and ‘power off$L’ work but i’m not able to release the brake too or e.g. show a popup. With SocketTest from PC brake release works fine, but not from PLC. I think the reason is associated with end of line signs like $R$L or $L becouse “power on” works with “$R$L” or " $L" but “power on” must be with “$L” only.
Of course I’ll let you know if i get some news. I also want to use the Teach Panel for programming only and have full control over the robot by a dashboard server, so i’ll be working on it.
Finally i found the solution.
I created TRCV block to see why UR doesn’t work with for example ‘brake release$L’.
I received this from UR: could not understand: $i¿½$0Ebrake release
I don’t know why but S7-1200 sends trash at the beginning of the command. I tried to send $Lbrake release$L and it works fine. Now, every command works when you use $L at the beginning and end. $Lplay$L, $Lclose safety popup$L etc.
I don’t need to use TRCV block so i don’t have it in my program, but the configuration of TRCV is the same as TSEND. In TRCV DATA i had a pointer to DB which consisted of Array[0…100] of Char. LEN parameter of TRCV i made 100. But it didn’t work great, i used it for a while just to know why TSEND didn’t work properly.
But there is no need to use TRCV block to have a full control over the robot from the PLC. I don’t use TRCV and i control the robot in every situations like violation, emergency stop, collision etc. without teach pendant.
If you say why do you want to use TRCV maybe i’ll be able to help you.
I know that it is not necessary to have a TRCV. But i think it is a good way to supervise the whole process. With the TRCV it is possible to check if the UR get the right command etc.
Thank you for your help…