Good morning together,
I´m struggling to get a running communication between my UR10e and my Siemens PLC (CPU 1212 TIA15.1) via Dashboard Server.
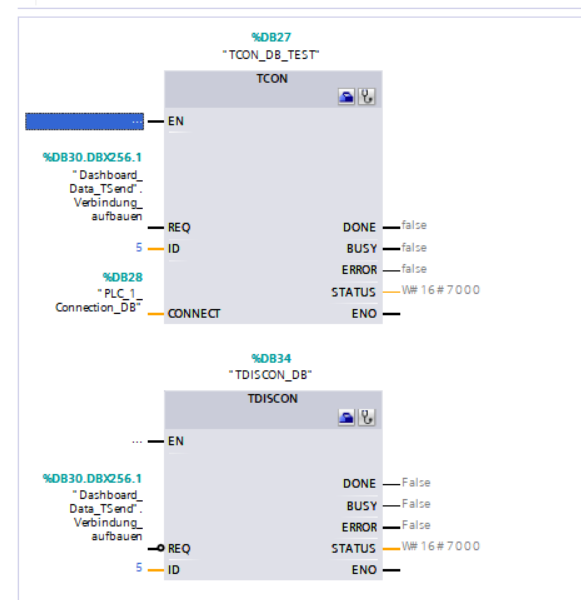
To do the data exchange I use a OUC Communication which is established via TCON (and deactivated via TDISCON):
For sending and receiving data i have to use the blocks TSend and TRCV:

The syntax of a command looks like this (you can see on the left site of the following pic).

By pressing a Button on HMI the String (from left site) will be moved to the string on the right site and then will be send to the UR.
That works fine.
Now i try to read the answer from the UR.
I put the Robot on Remote control, then i activate the OUC Communication on my PLC.
If i press now “Start” on my Siemens PLC, the string for example for “Stop” it looks like this:

I send the stop command (on Robot HMI i can see that the Robot is stopped).

But the Robot itself sends (to me) nonsense to the Siemens PLC.
For my process it is very important, that i can get a correct feedback from the UR at my Siemens PLC, as i not only want to start/ stop the robot from here… I also want to open different Robot-Programms from my Siemens PLC. For that i have to get a correct answer of which program (on Robot) is loaded.
When i try this Dashboard Server Communication with the SocetTester i can receive the answers like its explained in the Dashboard Server Manual:
https://www.universal-robots.com/articles/ur/dashboard-server-e-series-port-29999/
Does anyone has and Idea?
Thank you very much in advance.
Many greetings from Luxembourg.






