Hello,
We have created an URCAP which can acquire (X,Y,Z,rx,ry,rz) from installation node and transfer those points to a program node. once we play the program node the script in a background of URCAP will start running. In this process the urp/script file will run without any problem. When we are calling the urp file to default program, where the user can directly access the program from run program tab, the program is not running.
Steps involved in process:
-
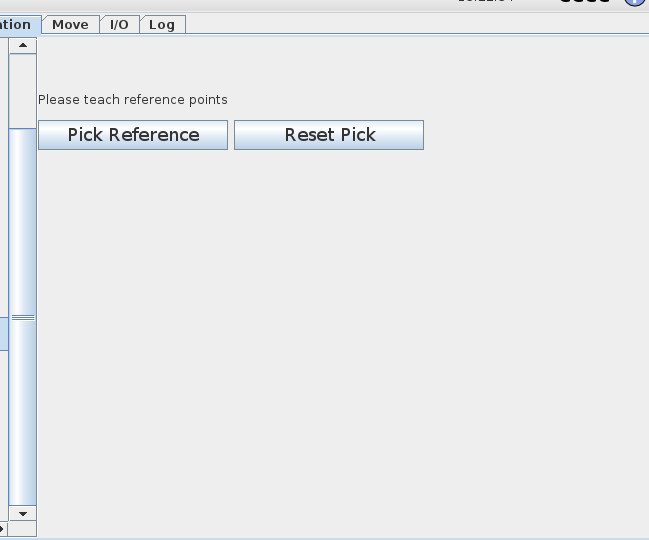
We teach (X,Y,Z,rx,ry,rz) from installation node using pick reference button
-
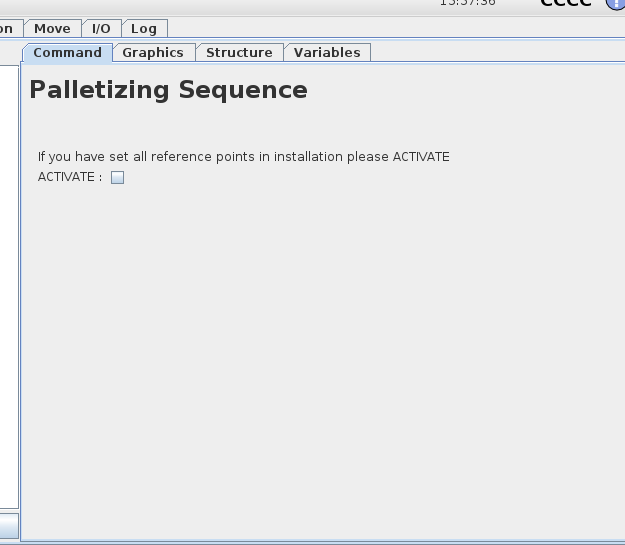
After saving the installation node we will transfer the points to program node and activate the program. The script will run in background.
-
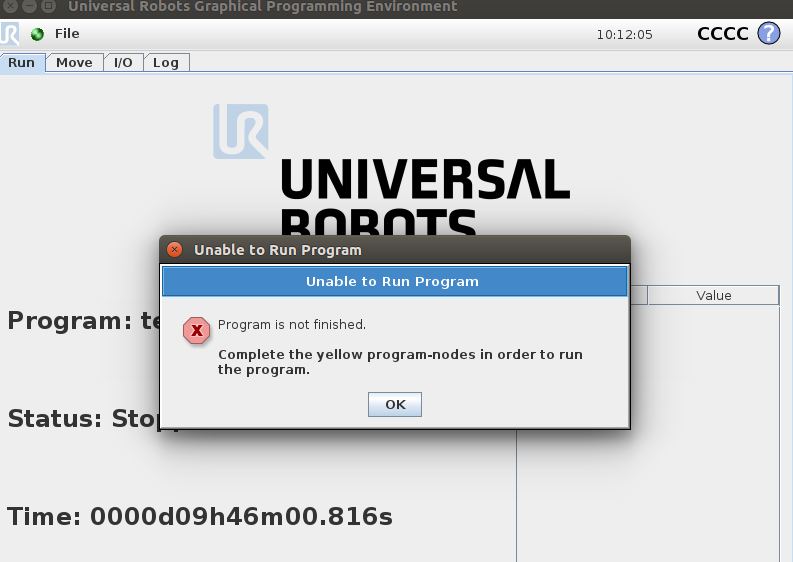
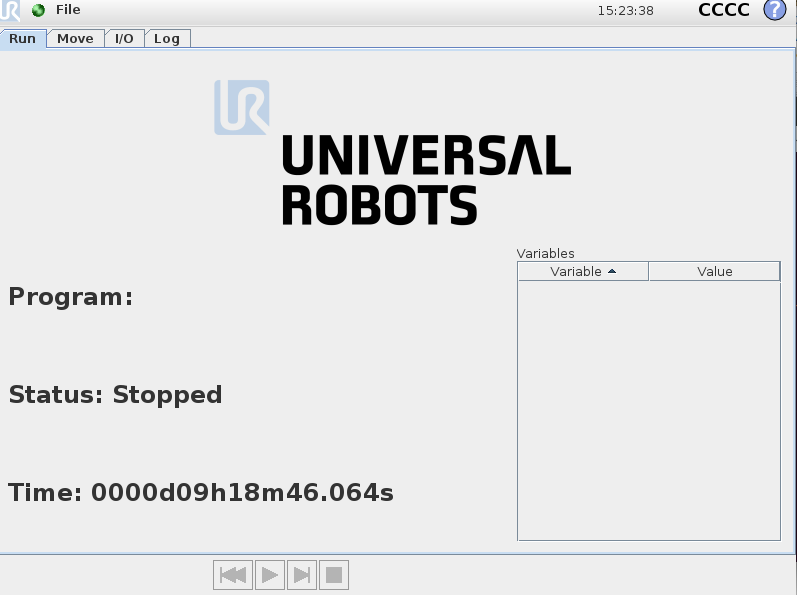
Then the saved urp file will be called in default program, where the user can directly access the program from run program tab, After robot powercycle process the save urp will not run directly through the run program tab.
note - For security reasons I have not mentioned the program name.
Can anyone please look into this architecture and suggest on what I should look into to solve this problem.
Thanks