I’ve achieved something similar before by putting the movement inside a frame force node applying an Rz torque. This spins the tool at the angular velocity specified in the force node while getting the rest of the movement parameters from the MoveL. You’d need some extra logic to make sure you didn’t hit the final joint rotation limits, and would need to be thoroughly tested to make sure the behavior was as intended in all circumstances but could be worth a try…
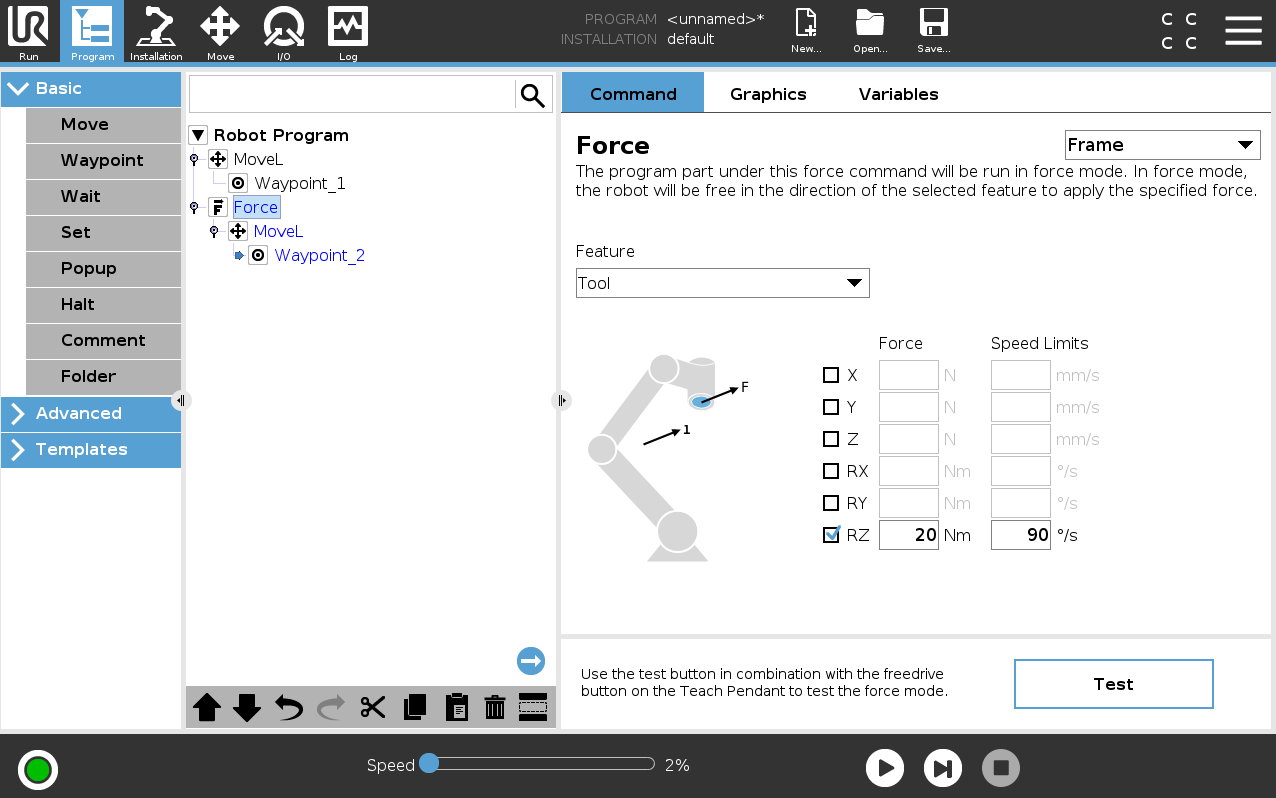
Inverting the sign on the torque value would make it spin in the opposite direction.