Unhandled exception is thrown when the program is started using an external button.
“Caught unhandled exception” window appears only when the program is started using the external button and when the robot has to return to the Home position from another waypoint.
Instead of Auto move screen, the exception window appears.
The exception is not thrown when the robot is already in the Home Position and the external button is pressed for starting the program.
Everything works perfectly when the program is started from the Teach Pendant.
The program conatins URCaps.
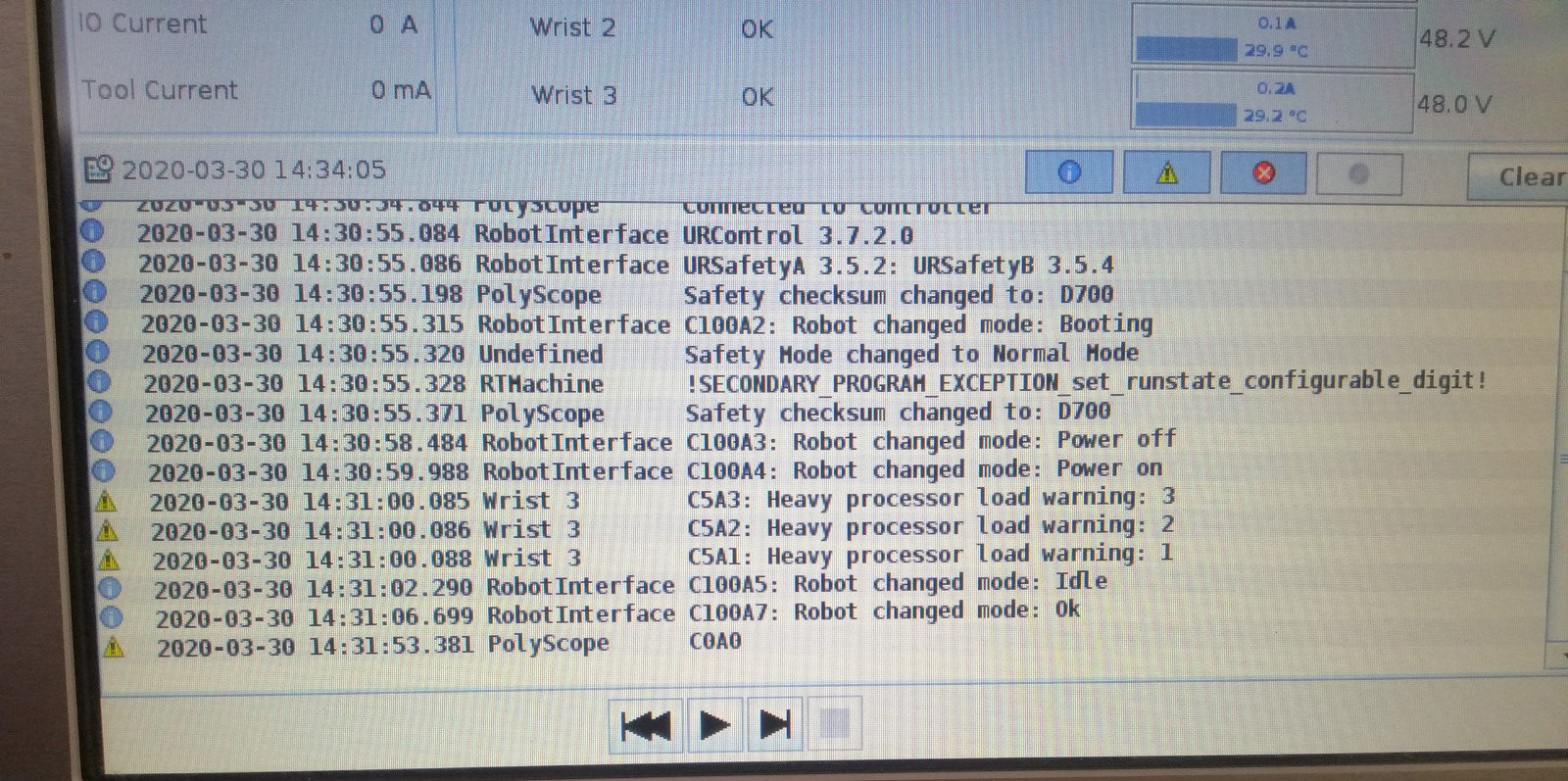
I have enclosed the screenshots below.
Thank you, in advance, for your help.