I have a very simple application that involves using the robot to grab a fastener and moving it to a working position for an operator. I would like the operator to be able to free drive the robot to a desired working position. Then once they do the operation it moves and picks a next fastener to move back to the last free driven position. Is this possible? thanks all!
I could be wrong, but I believe once the robot has been put in free drive you will be required to start from your “Home” position.
I would like the position it is in when the program is started to automatically become the new “Home” position.
Hi @rcharles,
you could do simply something like this ![]()
# save current pose
home_pose = get_actual_joint_positions()
# do stuff
movel(...)
# go to home_pose
movej(home_pose)
I think this is exactly what I am looking for. Thank you!
Would this be carried out via a script or am I missing something? Thanks!
Here’s what it looks like in PolyScope. ![]() Make an Assignment and write the script function as shown.
Make an Assignment and write the script function as shown.
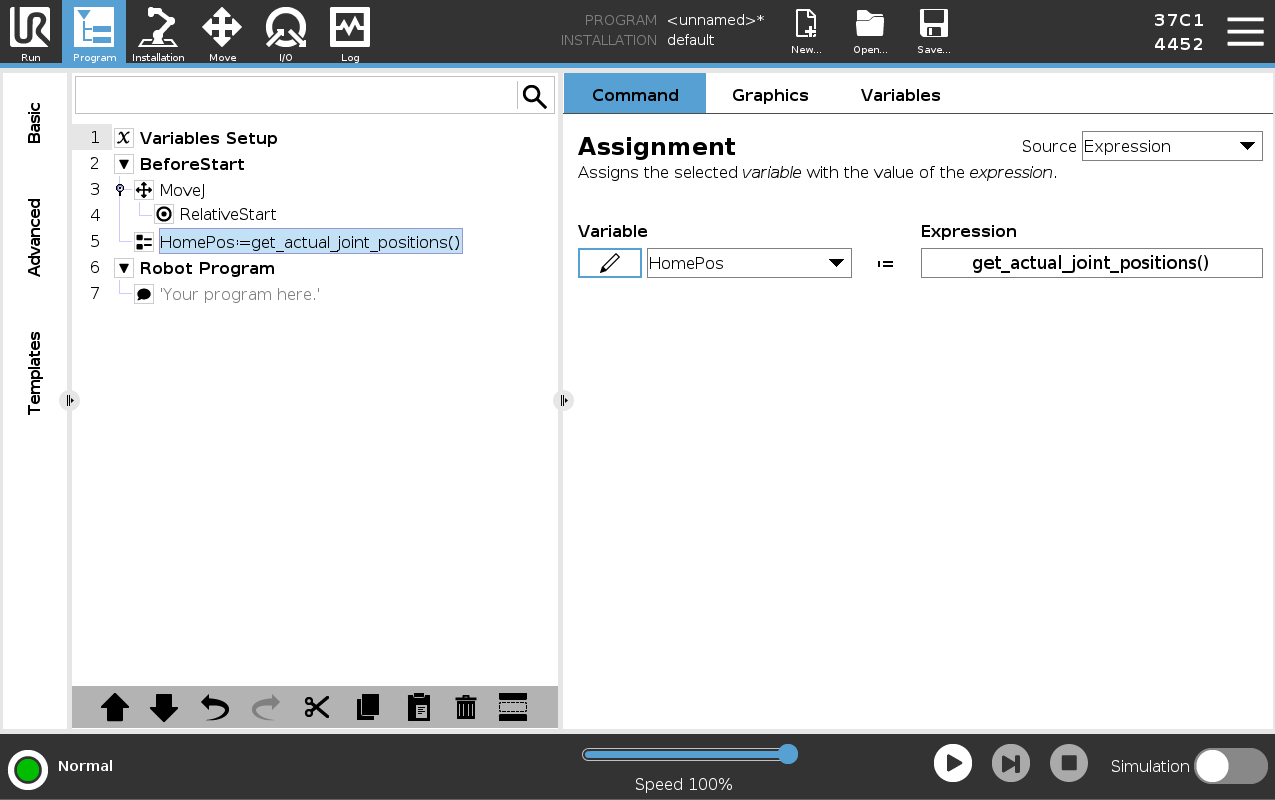
Later, when you want to move to the position, you make a Waypoint and change its type to Variable (upper right corner) and then pick the variable HomePos.

The RelativeStart waypoint I added allows the robot to start its program without moving to a waypoint first. It’s just a relative waypoint with zero movement.
