Hi community
Universal Robots and FZI are happy to announce that ROS as a Service has entered the beta testing stage!
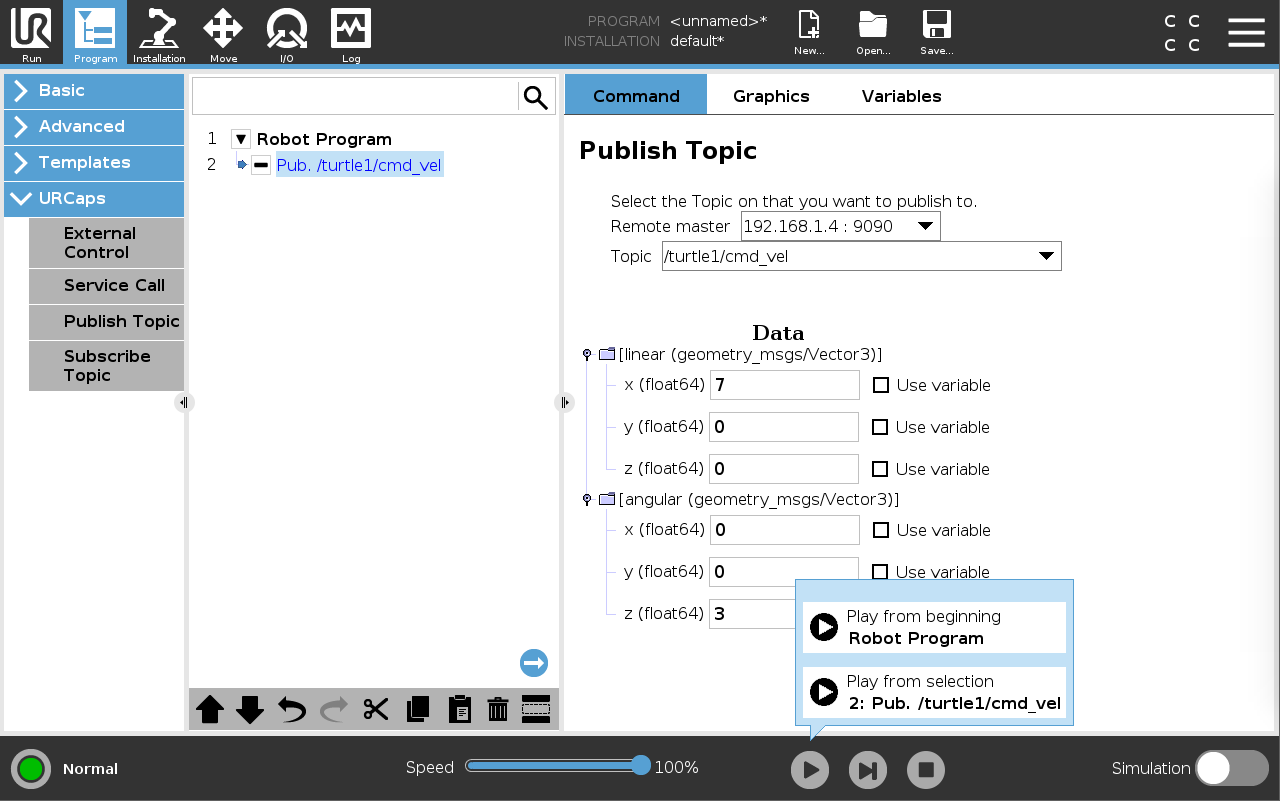
This URCap allows you to call ROS services, actions and use topics directly from within your Universal Robots application setup on the Teach panel. The main program will stay on the robot while you can integrate features provided by different ROS nodes over the network.
 .
.
As this project is still under a Beta testing phase, there might be some glitches here and there. To further improve this URCap’s quality and robustness we’d like to encourage everybody to open up a new issue inside the project issue tracker if there’s something unexpected happening.
Please give us feedback through the survey, Issues or ROS@universal-robots.com on what you have tested and how it worked out.
The survey also contains feedback to the currently on-going beta phase of the new Cartesian control features for the ur_robot_driver. We’d very much appreciate any additional feedback on that and we’d like to encourage you to try that out as well.
Happy testing ![]()