Problem
I’m writing a program which connects to realtime interface using QTcpScoket from Qt5.9. When the program is unable to read from socket for a short period of time (eg. hit a break point during debugging or thead hangs), nothing will be received from the robot anymore.
Environment
robot: UR5 with CB3.1 and PolyScope3.5
PC: Windows10
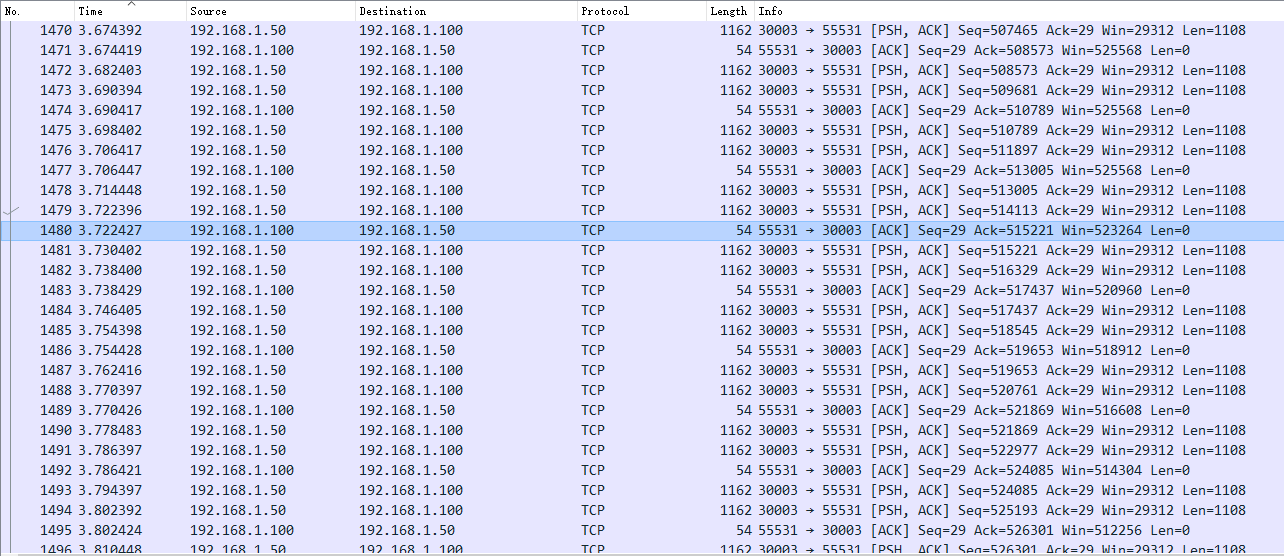
I tried to use Wireshark to track down the underlying communication, and the results are following:
The PC’s IP is 192.168.1.100, and robot’s IP is 192.168.1.50.
After the program hit a break point, the window size of the socket started decreasing (No. 1480).
About 4 seconds later, the communication was completely blocked (No. 2189) due to TCP Window Full. When the program continued to run (No.2207), some pending data frames were mixed and splited into MTUs.

Finally, the socket became silent very soon.

My temporary workaround is to close and reopen the socket, but is there a better solution? Also, the broken packets after TCP Window Update look like a bug very much.