I have created the below plane
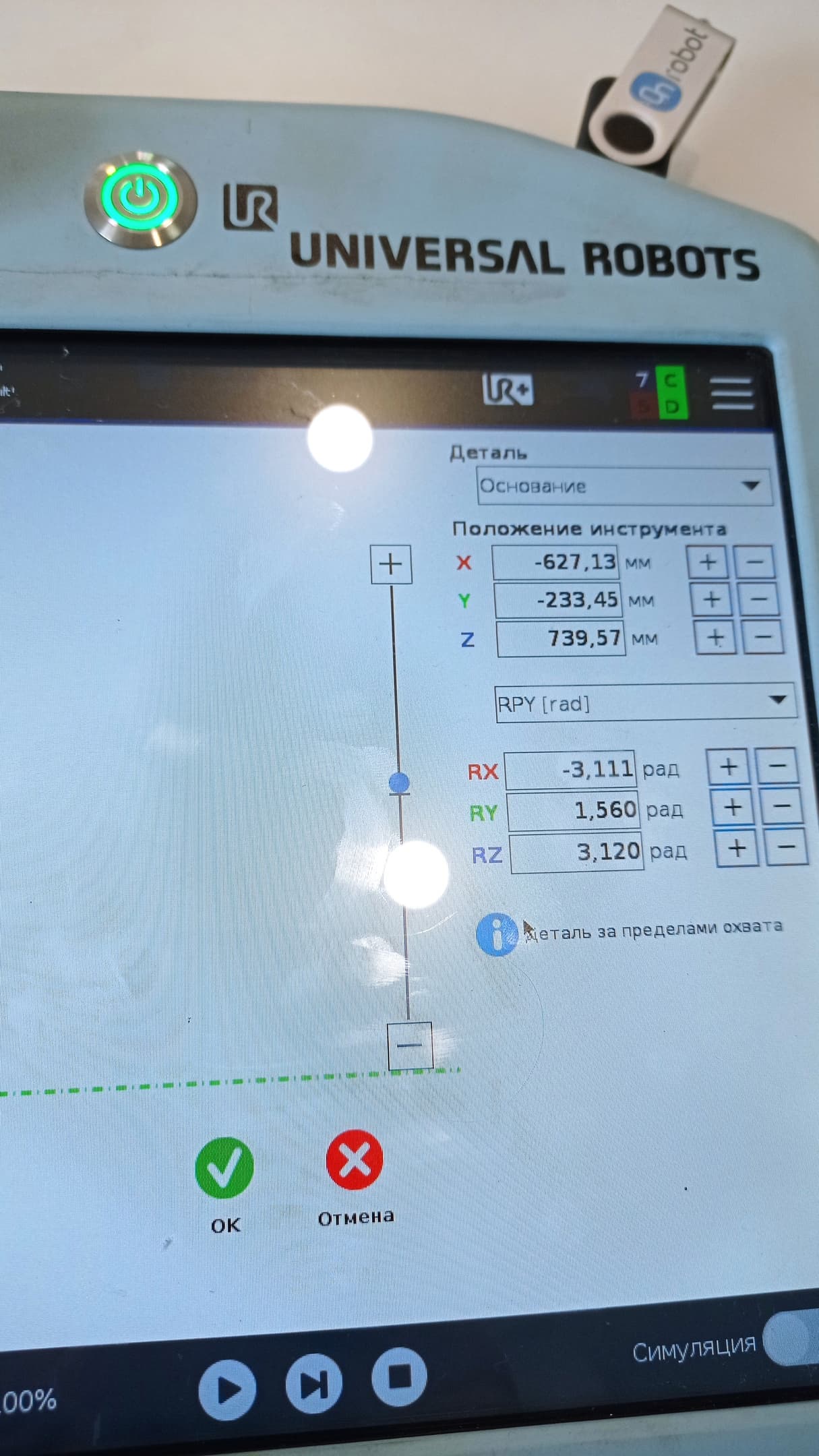
In the script plane is written as p[-0.6271267633975325,-0.2334469065559606,0.7395722520063815,0.04100748901117013,1.5812879442196548,-0.04108451531028778]
PRY[rad] -3.111, 1.56, 3.12 and 0.0410, 1.581, -0.041 the same plane. However, if I write a plane in the script as p[-0.6271267633975325,-0.2334469065559606,0.7395722520063815, -3.111, 1.56, 3.12] then the robot reacts incorrectly. Why?