Hi, I’m trying to make a robot reach a position with a given shoulder and elbow limitations, is there a way of guarantee just this 2 joints and let the rest do the inverse kin by themselves?
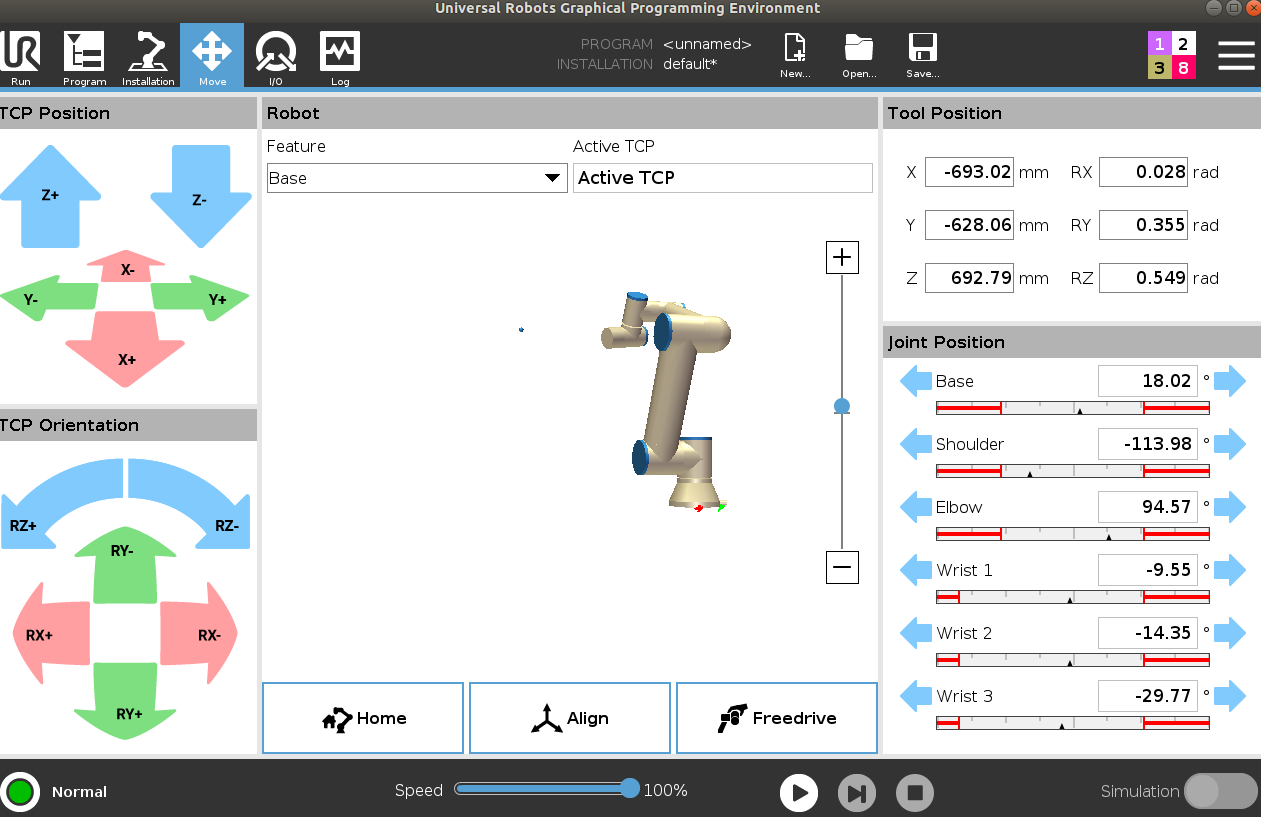
Screenshot from 2020-03-01 12-20-11|690x447
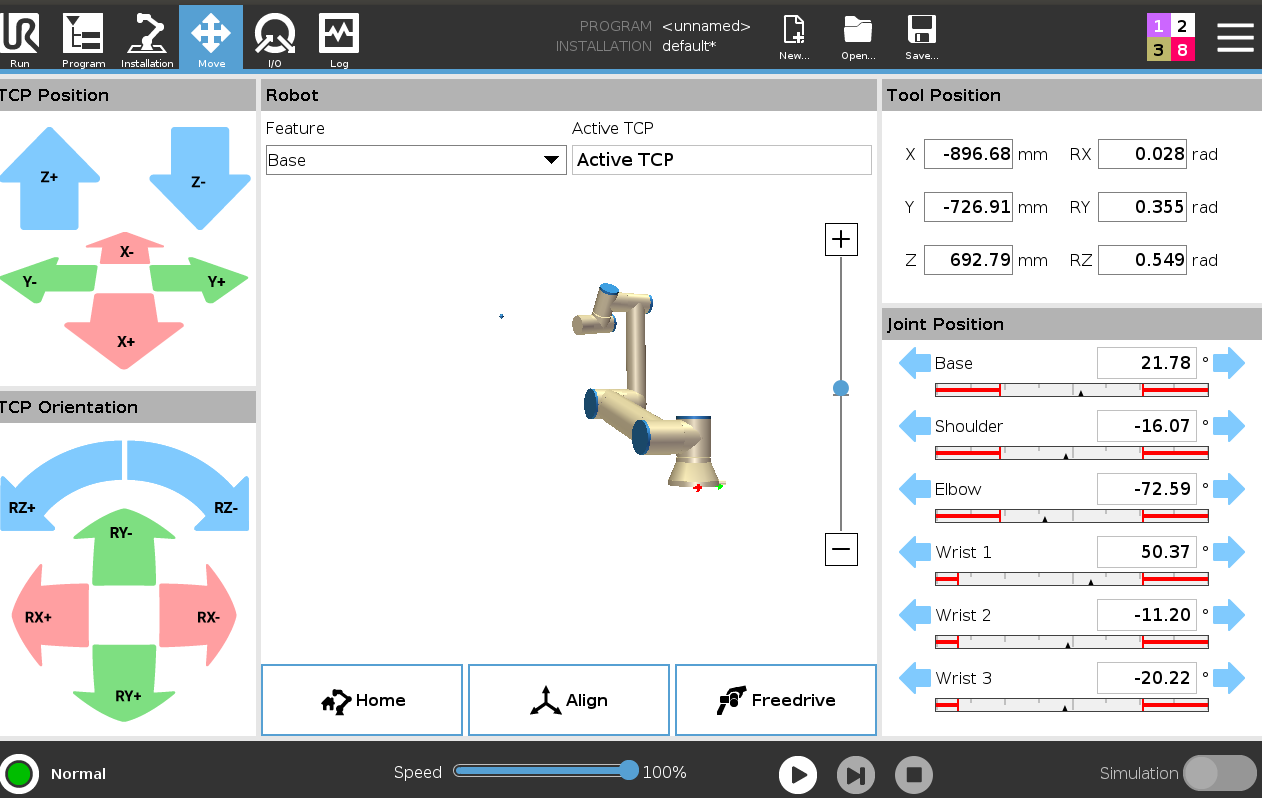
Screenshot from 2020-03-01 12-17-35|690x436
{kind=link}
{kind=link}
So far I tried the following things:
-
Pre-positioned the robot in an intermediate position; But is not the best solution since in this case I have a huge variation in Z.
2 Tried to use get_inverse_kin and set the joints in qnear to something close to the joint angles. But I didn’t manage to see any difference. Any hints about it?
3- NEXT STEP. Try to implement an algebraic solver of inverse kin working from bottom-up direction and set my conditions.!