I have finished a admittance force control program in PC, acquire F/T sensor data in 500HZ though 30003 port, and send servoj script though 30003 port.
Considering the real-time, I want to write this algorithm in teachpendant, but I don’t know how to acquire F/T sensor data in teachpendant. Please give me some information , Thanks!
Hello @lvyq83
Do you want to display the F/T Sensor data inside the UI of your URCap in Teach Pendant?
You can take a look at this sample, which illustrates it: GetRobotData
Or do you want to access the data during a running program?
Then you should take a look in the UR-Script manual and review the different F/T related functions
Thanks@sko, I try to write more detailed interpretation.
I finished a admittance algorithm in my pc. I acquire FT sensor data though 30003 port, and calculate the desired position, then send the position to UR though script servoj. But if the program was run in PC, there was a TCP/IP communication between PC and UR controller, it is not good for the real-time control system. So I want write this admittance algorithm in teach pendant, if the admittance algorithm is run in UR controller, without TCP/IP communication, it is good for the real-time control system.
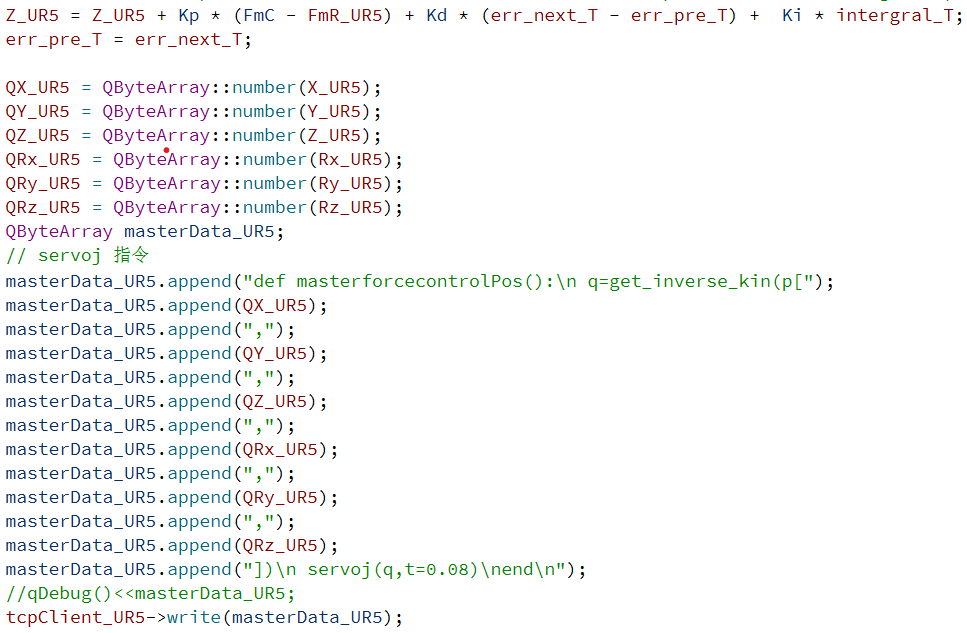
The fig show some parts of my program. Now I want to write this program in teach pandant.
Thanks!