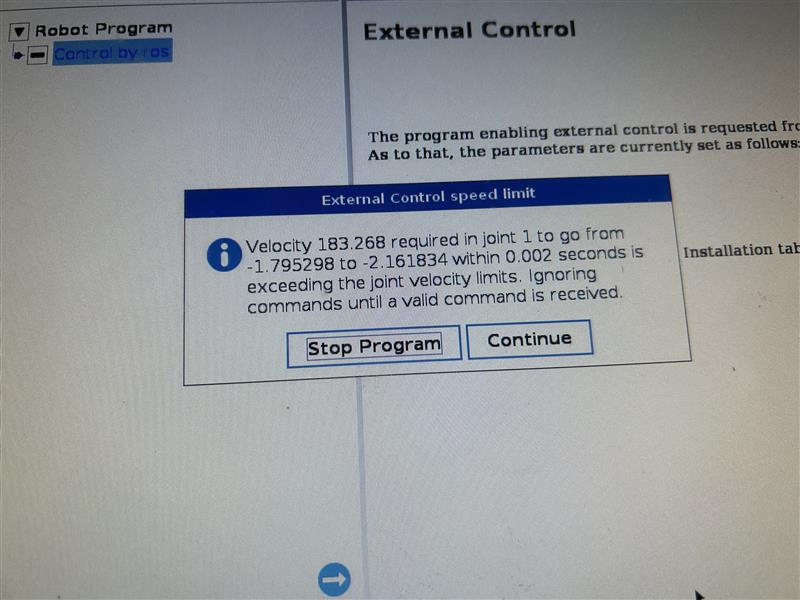
I am using ros2 humble version for controlling the ur10e robot. I get this error and my robot stops. I am using the default package from robot driver: ros2 launch ur_robot_driver ur_control.launch.py \ ur_type:=ur10e robot_ip:=10.6.0.16 kinematics_params_file:=/my_robot_calibration.yaml and to move the robot i use moveit packages: ros2 launch ur_moveit_config ur_moveit.launch.py ur_type:=ur10e. While on Rviz, when trying to move just a few positions up or down, there is this error and the robot stops motion. What should i do in order to rectify this?
I earlier saw this page as well for the exact error, Safe Setup for UR10e Hardware with Cartesian Controllers? · Issue #210 · fzi-forschungszentrum-informatik/cartesian_controllers · GitHub I understand this is for Cartesian controllers whereas I use the scaled trajectory controller and the update rate is exactly 500 hz as mentioned.