Hello dear community
I would like to know the joint torques due to the end efector
forces, using the jacobian. Before to use a real robot.
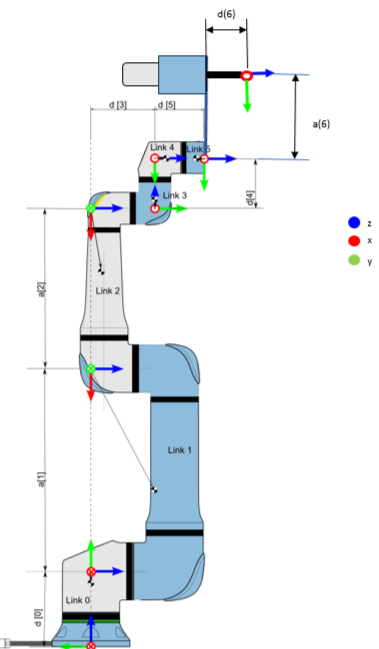
Is it posible to calculate the D-H parameters adding a external tool (srcrewdriver) to the end efector?
I attached the picture of the robot with the tool.
It is correct to have. Theta(6), a(6), d(6) ?
Thanks for your help.
Yes, you can. Your tool will be the 7th matrix in the DH chain of calculations. UR follows the basic standard, with some naming differences, but that’s documented in their excellent online support section. Note though, UR functions do not use your 7th matrix, but internally compensate for a tool by means of "set_tcp()'. But if you calculate the jacobian yourself, adding the 7th matrix should be trivial 
Dear @mvrooij thank you for your reply
Another question !!
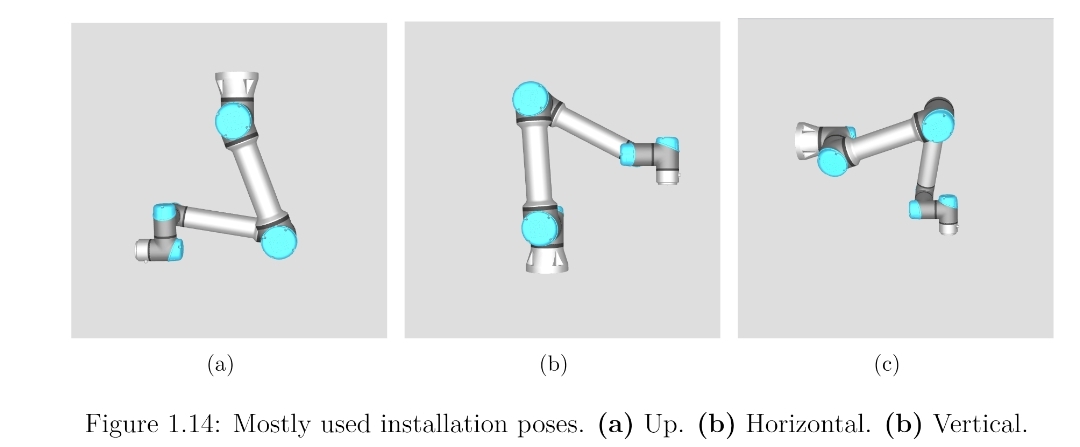
When the robot is install in other position Up or vertical
What changes are on the DH matrix write there Universal Robots - DH Parameters for calculations of kinematics and dynamics ?