Hi all,
I’m modeling a 6-DOF robotic arm (UR5e type), but the elbow joint (joint 3) is fixed at 90°, leaving only 5 controllable joints. I need to construct a new DH table with 5 rows to represent this modified chain.
1.What’s the standard method for handling a fixed internal joint in the DH table—should I combine the adjacent links or “skip” the broken joint?
2. Any references, examples, or best practices for assigning DH parameters after a joint is fixed?
Thanks for any advice or literature!
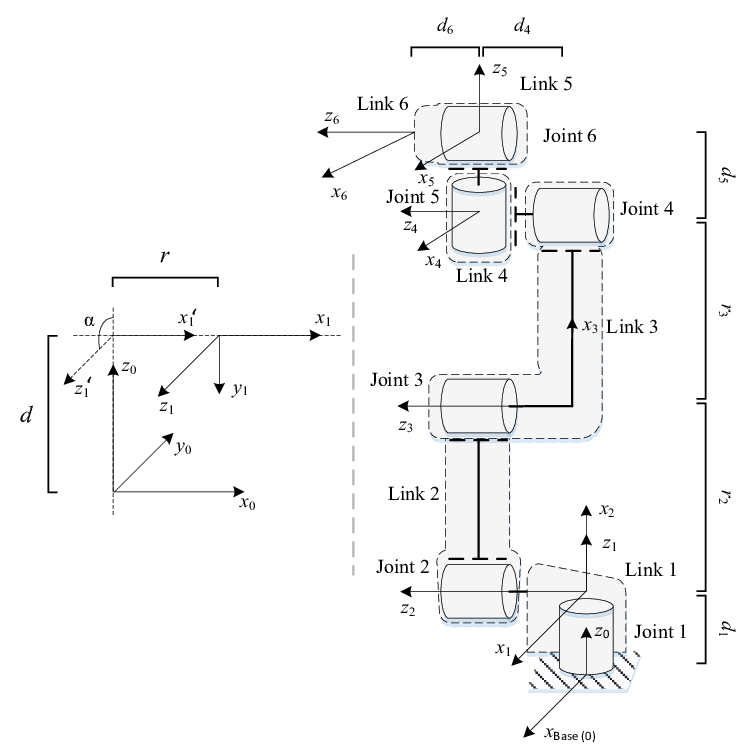
in the image the joint 3 is broken or say its stuck at 90 degrees