
Hi all, could help me underatand and correct my source code?
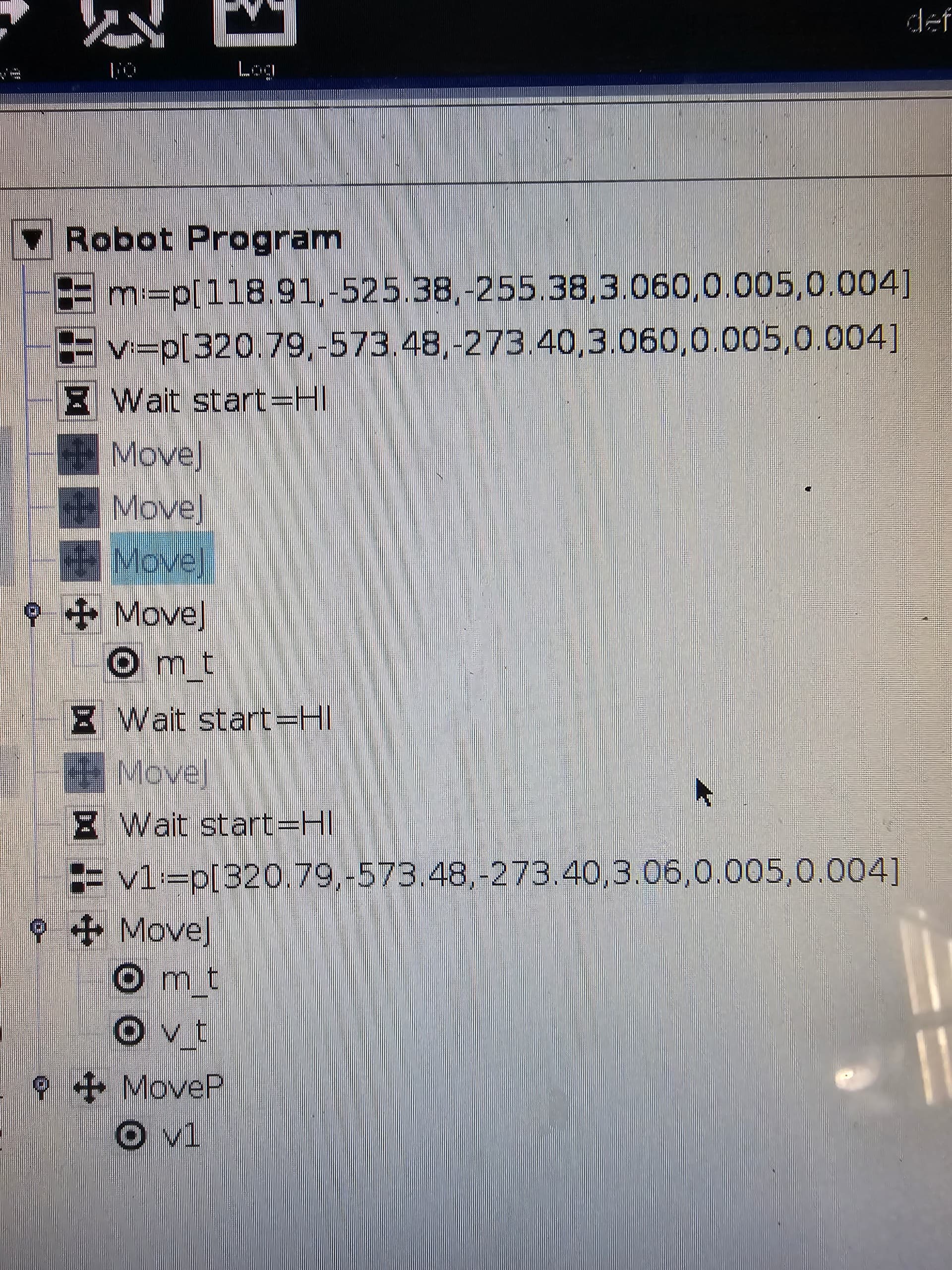
I have a point teach in M [320.79, -573.48, -273.40, 3.060, 0.005, 0.004], Ignore Active TCP, Base.
Then i assign in v1=[320.79, -573.48, -273.40, 3.060, 0.005, 0.004].
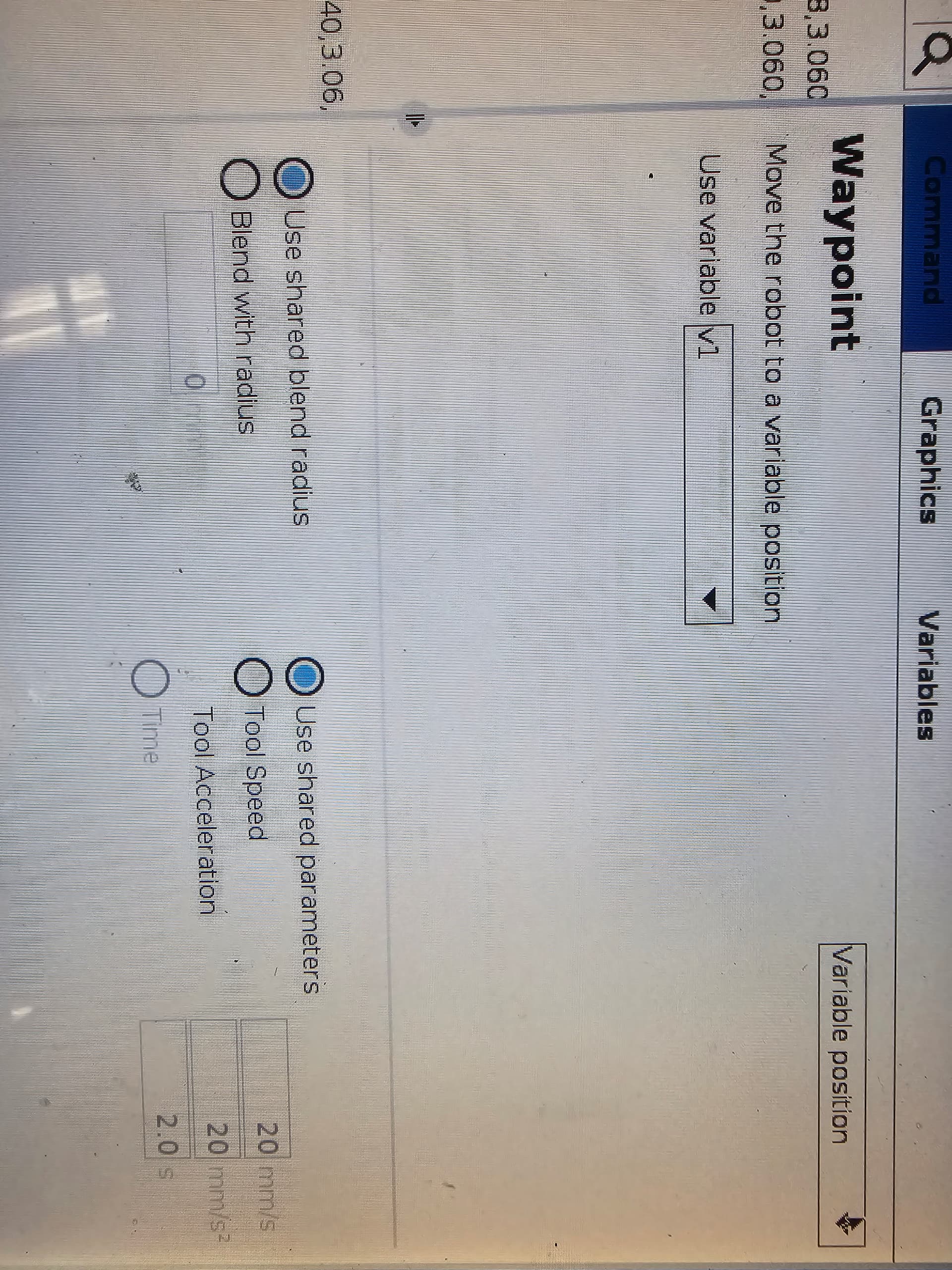
When MoveP to variable position, v1, it does not move to “M” point as i teached before.
What shall i do correction to my source code?
What does it do instead? I would assume it throws a message saying it can’t reach the target position? The pose positions are (as you correctly say) in METERS. There’s no way the robot is going to reach something that is 573 METERS away from its base. You likely mean for it to be in MILLImeters, in which case you need to divide your x, y, and z values by 1000. Also note that the RX, RY, and RZ values expect radians, which looks like you have correct. In short, the position array should be p[0.32079, -0.57348, -0.27340, 3.060, 0.005, 0.004]
Switch the “Feature” in that screen to Base. The robot sees all its coordinates in Base, not View or any other Feature. I assume you have a reason for wanting to hardcode this value instead of just teaching a waypoint? Otherwise you’re making this way harder on yourself than you need to.
I agree with Eric that this is likely related to the selected Plane. Additionally, another factor that could influence the final position is the shared blend radius. For instance, if it is set to 20 mm, the robot may not reach the final target position as expected.